Direcció per cable
Cybertruck utilitza la rotació controlada per cable per substituir el mètode tradicional de rotació mecànica del vehicle, fent que el control sigui més perfecte. Aquest també és un pas necessari per passar a la conducció intel·ligent de gamma alta.
Què és un sistema de direcció per cable? En poques paraules, el sistema steer-by-wire cancel·la completament la connexió física entre el volant i el volant i utilitza senyals elèctrics per controlar la direcció del volant.
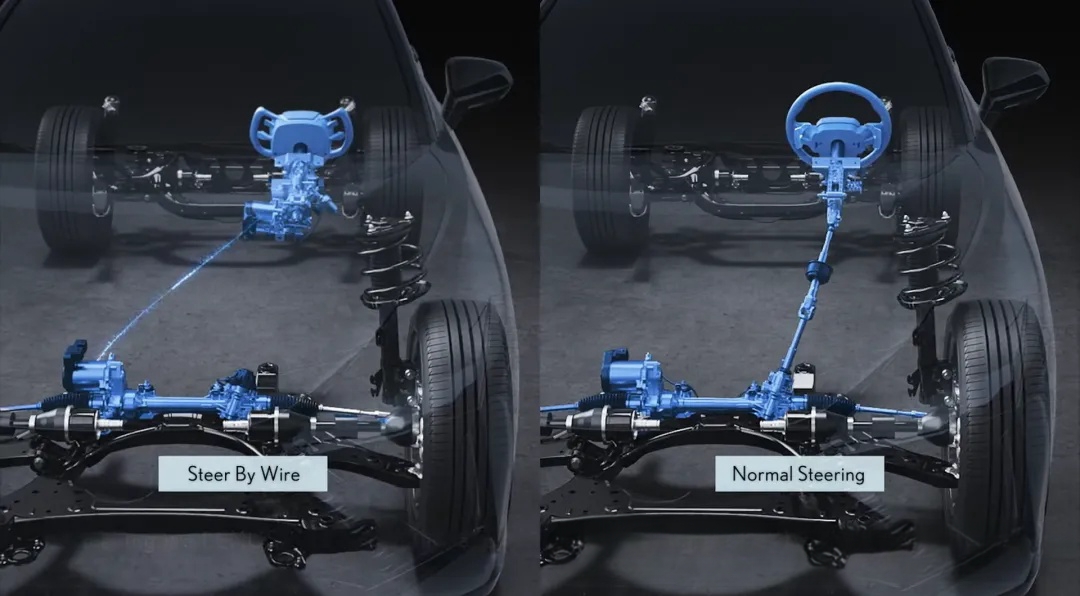
El sistema steer-by-wire no només té tots els avantatges del sistema de direcció mecànic tradicional, sinó que també pot aconseguir característiques de transmissió angular que són difícils d'aconseguir amb l'optimització dels sistemes mecànics.
El sistema steer-by-wire no és una tecnologia nova. Diversos fabricants d'OEM han desenvolupat aquesta tecnologia fa molt de temps, com Toyota, Volkswagen, Great Wall, BYD, NIO, etc., així com els mundialment coneguts Tier 1 Bosch, Continental i ZF estan desenvolupant i implementant la direcció per cable. sistemes, però només el Cybertruck de Tesla s'ha posat en producció massiva en el veritable sentit.
Per tant, el rendiment posterior de Cybertruck és molt líder en el mercat. Al mateix temps, aquesta tecnologia també és la tecnologia bàsica del "xassís lliscant", de manera que el seu estat de lot posterior és molt significatiu.
Tot i que la tecnologia steer-by-wire pot eliminar el mecanisme de transmissió original més voluminós en comparació amb la tecnologia tradicional i pot fer que el vehicle sigui més lleuger (la llum significa un baix cost i una llarga resistència) i un cost més baix, l'electrificació transmet el control mitjançant senyals. Si alguna cosa va malament, les conseqüències seran molt greus. Per tant, quan aquesta tecnologia es va utilitzar per primera vegada en avions d'aviació, va adoptar un disseny doble redundant per a una doble assegurança.
Actualment, la tecnologia Steer-by-wire s'utilitza àmpliament en els vehicles, principalment en la tracció posterior, i rarament s'utilitza en la tracció davantera. La raó principal és que aquesta tecnologia no pot tenir cap problema, i les fallades del senyal elèctric poden ser causades per molts aspectes, com ara les interrupcions de la bateria, la pèrdua del retard del senyal, etc.
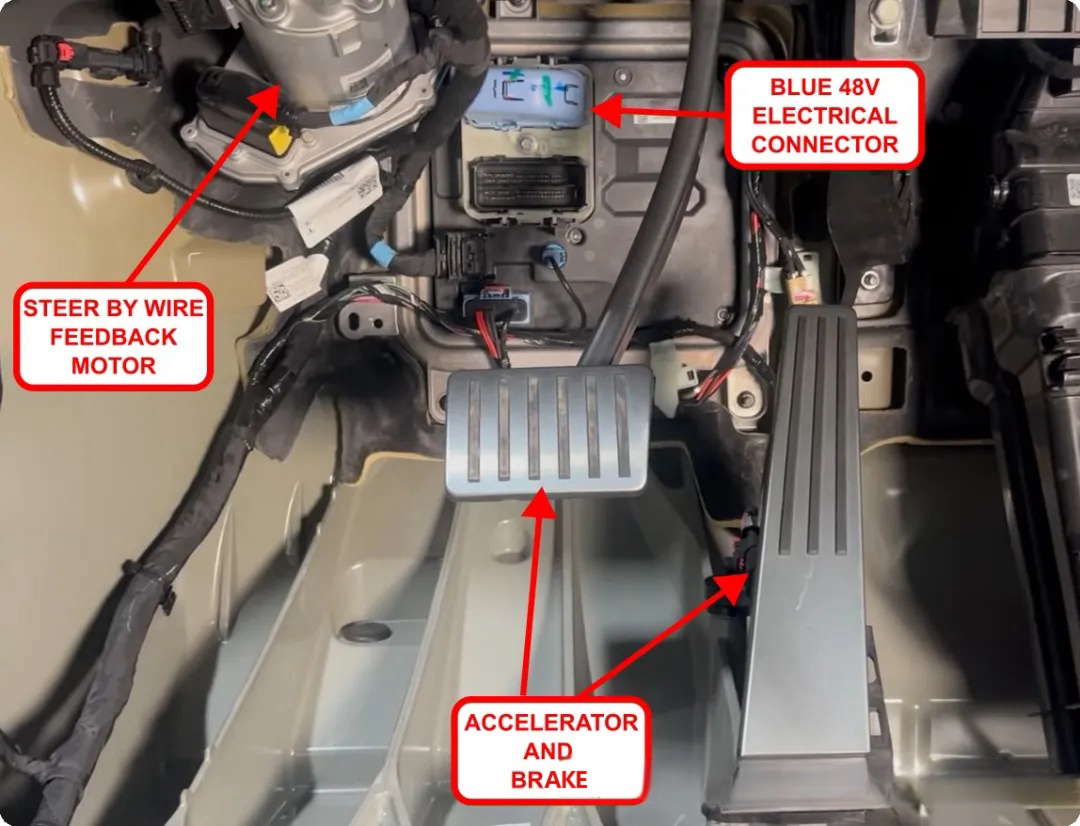
Per evitar que la bateria es quedi sense energia sobtadament, Cybertruck no només utilitza un sistema de bateries de 48 V per alimentar el motor del costat esquerre de la imatge següent, sinó que també es connecta a l'alimentació d'alta tensió. També hi ha 2 bateries de reserva per assegurar-se que la bateria no estigui encès, i també és un disseny doble redundant.
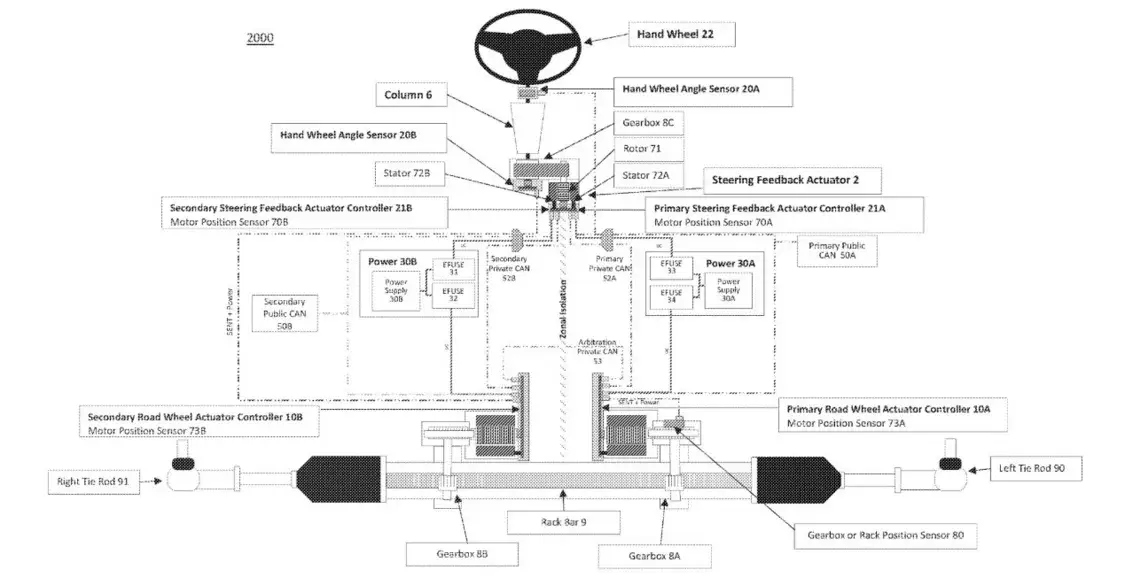
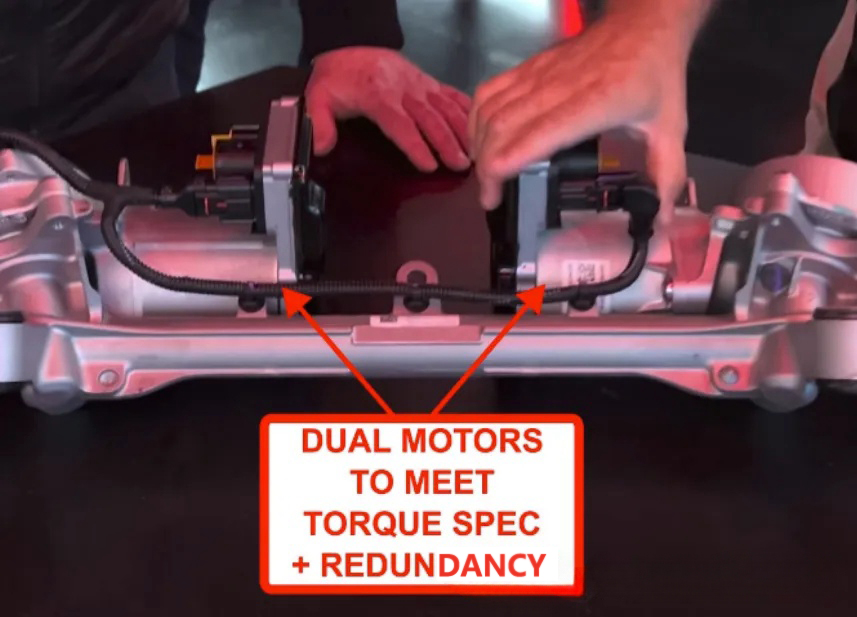
El sistema de direcció per cable del Cybertruck utilitza dos motors, cadascun capaç de produir aproximadament el 50-60% del parell màxim durant condicions d'aparcament a baixa velocitat. Si un falla, encara hi ha un motor disponible per proporcionar redundància. El mateix motor (només un) s'utilitza per conduir el sistema de direcció posterior. Aquest motor pot donar al conductor una sensació de retroalimentació simulada., aquesta retroalimentació és molt important. Sense aquesta retroalimentació, el conductor és menys capaç de percebre la direcció del volant. situació, i també pot transmetre dades de pneumàtics i terra a la unitat d'anàlisi per oferir una millor experiència de conducció. Per exemple, quan gireu la direcció, pot mantenir la millor adherència entre els pneumàtics i el terra.
Atès que els senyals elèctrics han substituït el control mecànic tradicional, l'eficàcia i la puntualitat de la transmissió del senyal són molt importants. Cybertruc utilitza la comunicació Ethernet per substituir la comunicació CAN tradicional. Disposa d'un sistema Gigabit Ethernet per moure dades, que pot satisfer les necessitats de comunicació d'alta velocitat, la xarxa de dades té una latència de només mig mil·lisegon, el que la fa ideal per als senyals de volta i també proporciona una amplada de banda suficient per permetre diversos controladors. per comunicar-se en temps real.
Ethernet té un ample de banda més gran que la comunicació CAN. Tot el vehicle pot compartir una cadena de margarides. Mitjançant la tecnologia POE, la interfície Ethernet es pot alimentar directament sense un conjunt separat de fonts d'alimentació de baixa tensió, cosa que pot reduir considerablement el cost del cablejat. Aquesta tecnologia també es comercialitzarà i s'implementarà ràpidament amb la ràpida comercialització i implementació d'Ethernet al vehicle i la futura conducció intel·ligent.
Resumir:
Tot i que la tecnologia steering-by-wire no és molt avançada, s'ha utilitzat en lots en vehicles. Almenys l'anterior Lexus va trobar molts problemes quan va intentar atrapar crancs.
Aquest tipus d'eliminació directa del control mecànic del sensor tradicional mitjançant senyals elèctrics, tot i que és d'alta qualitat i baix preu, també pot permetre als conductors tenir una millor experiència de conducció, però el requisit més bàsic per als vehicles és la seguretat. Hi ha molts nivells de factors de fallada en els senyals elèctrics.
Promoure el progrés tecnològic requereix una verificació del mercat i requereix temps. Si aquesta tecnologia esdevé molt popular en el futur, si és estable, la tecnologia integrada del "skateboard elèctric" es millorarà encara més.
Hora de publicació: 01-abril-2024