Steering-By-Wire
Cybertruck bruger wirestyret rotation til at erstatte den traditionelle mekaniske rotationsmetode for køretøjer, hvilket gør styringen mere perfekt. Dette er også et nødvendigt skridt for at gå ind i avanceret intelligent kørsel.
Hvad er et steer-by-wire-system? Kort sagt annullerer steer-by-wire-systemet fuldstændig den fysiske forbindelse mellem rattet og hjulet og bruger elektriske signaler til at styre hjulstyringen.
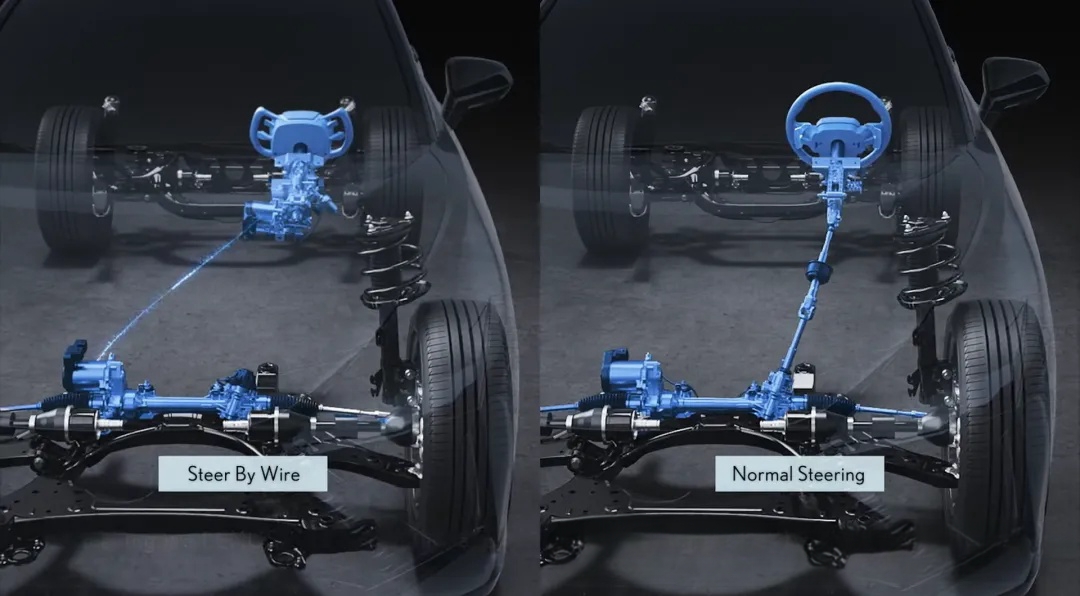
Steer-by-wire-systemet har ikke kun alle fordelene ved det traditionelle mekaniske styresystem, men kan også opnå vinkeltransmissionskarakteristika, som er vanskelige at opnå med mekaniske systemer Optimering.
Steer-by-wire-systemet er ikke en ny teknologi. Forskellige OEM'er har udviklet denne teknologi for længe siden, herunder Toyota, Volkswagen, Great Wall, BYD, NIO osv., samt de verdenskendte Tier 1 Bosch, Continental og ZF udvikler og implementerer steer-by-wire systemer, men kun Teslas Cybertruck er blevet sat i masseproduktion i egentlig forstand.
Derfor er Cybertrucks efterfølgende præstation meget markedsledende. Samtidig er denne teknologi også kerneteknologien i "glidende chassis", så dens efterfølgende batchstatus er meget meningsfuld.
Selvom steer-by-wire-teknologi kan eliminere den originale mere omfangsrige transmissionsmekanisme sammenlignet med traditionel teknologi og kan gøre køretøjet lettere (lys betyder lave omkostninger og lang holdbarhed) og lavere omkostninger, transmitterer elektrificering kontrol gennem signaler. Hvis noget går galt, vil konsekvenserne være meget alvorlige. Derfor, da denne teknologi første gang blev brugt på luftfartsfly, vedtog den et dobbelt redundant design til dobbeltforsikring.
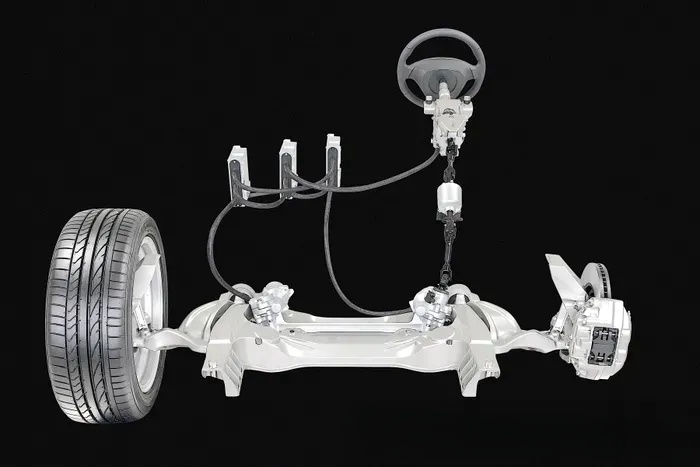
Steer-by-wire-teknologi er i øjeblikket meget udbredt i køretøjer, hovedsageligt i baghjulstræk, og bruges sjældent i forhjulstræk. Hovedårsagen er, at denne teknologi ikke kan have nogen problemer, og elektriske signalfejl kan være forårsaget af mange aspekter, såsom batteristrømafbrydelser, signalforsinkelsen går tabt, osv.
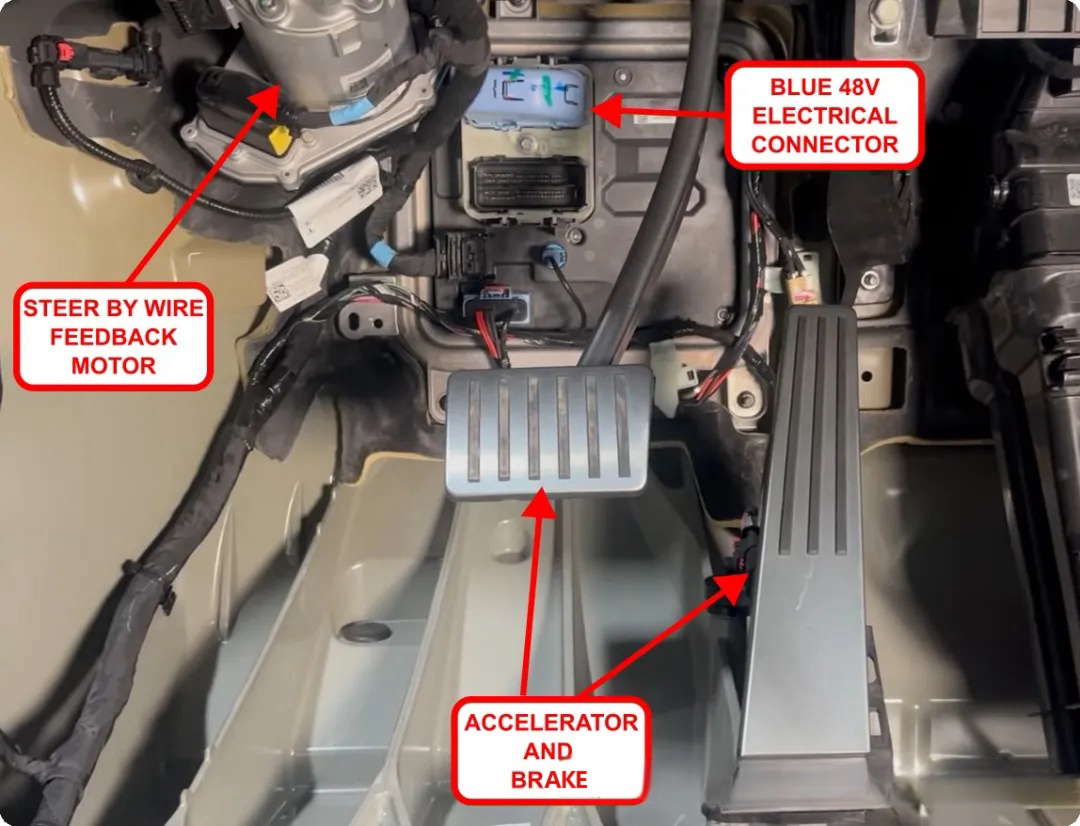
For at forhindre, at batteriet pludselig løber tør for strøm, bruger Cybertruck ikke kun et 48V batterisystem til at drive motoren i venstre side af billedet nedenfor, men tilsluttes også højspændingsstrøm. Der er også 2 backup batterier til at sikre at batteriet ikke er tændt, og det er også et dobbelt redundant design.
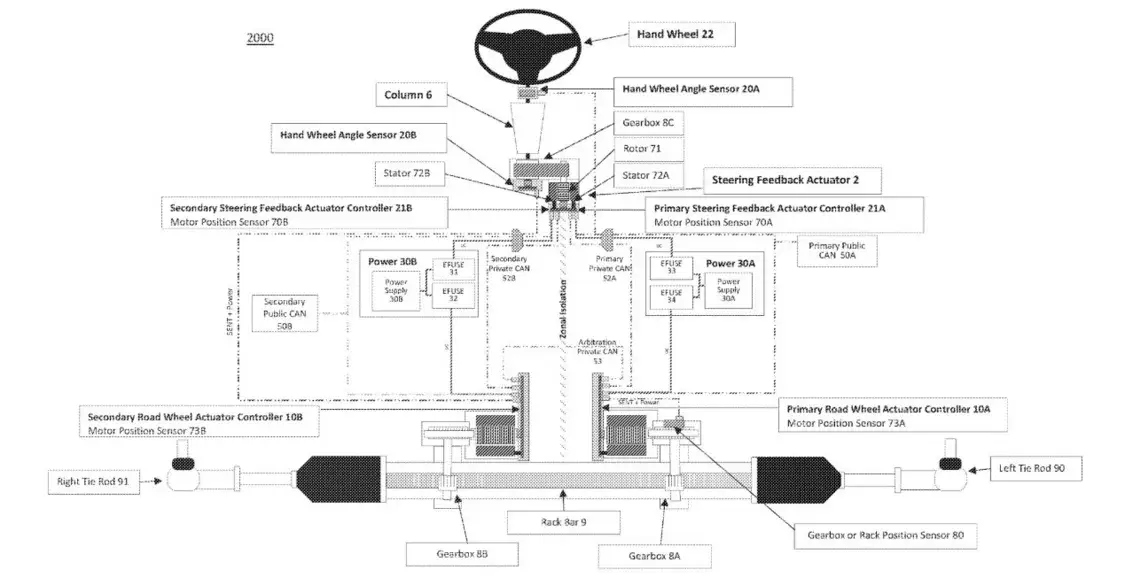
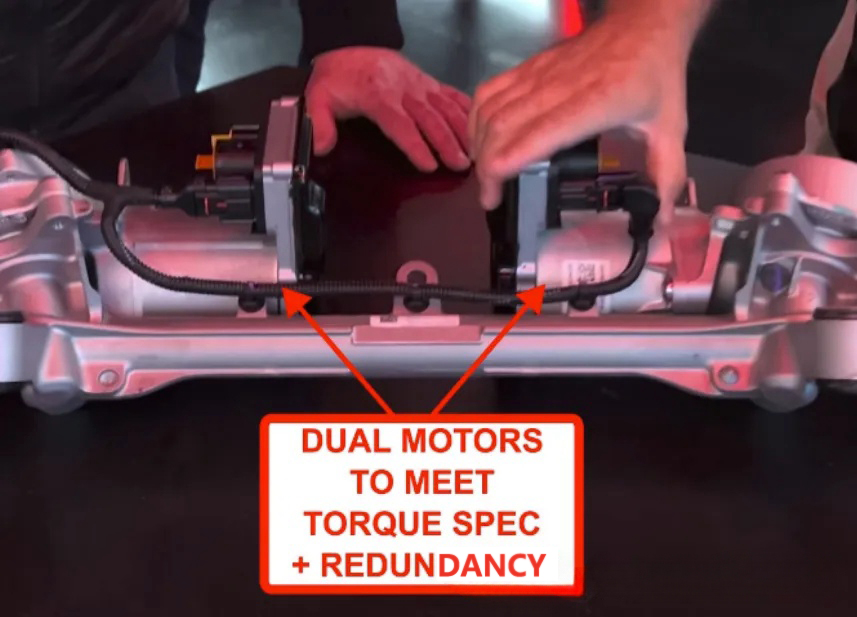
Cybertruckens steer-by-wire-system bruger to motorer, der hver er i stand til at producere cirka 50-60 % af det maksimale drejningsmoment under parkeringsforhold ved lav hastighed. Hvis en fejler, er der stadig en motor tilgængelig til at give redundans. Den samme motor (kun én) bruges til at drive det bagerste styresystem. Denne motor kan give føreren en følelse af simuleret feedback. Denne feedback er meget vigtig. Uden denne feedback er føreren mindre i stand til at opfatte rattet. situation, og den kan også overføre dæk- og jorddata til analyseenheden for at give en bedre køreoplevelse. Når du for eksempel drejer retningen, kan den bevare det bedste greb mellem dækkene og underlaget.
Da elektriske signaler har erstattet traditionel mekanisk styring, er effektiviteten og rettidigheden af signaltransmission meget vigtig. Cybertruc bruger Ethernet-kommunikation til at erstatte traditionel CAN-kommunikation. Det har et Gigabit Ethernet-system til at flytte data, som kan opfylde behovene for højhastighedskommunikation, datanetværket har en latenstid på kun et halvt millisekund, hvilket gør det ideelt til blinklys, og det giver også tilstrækkelig båndbredde til at tillade forskellige controllere at kommunikere i realtid.
Ethernet har en højere båndbredde end CAN-kommunikation. Hele køretøjet kan dele en daisy chain. Ved hjælp af POE-teknologi kan Ethernet-grænsefladen strømforsynes direkte uden et separat sæt lavspændingsstrømforsyninger, hvilket i høj grad kan reducere omkostningerne til ledningsnettet. Denne teknologi vil også hurtigt blive kommercialiseret og implementeret med den hurtige kommercialisering og implementering af in-vehicle Ethernet og fremtidig smart kørsel.
Sammenfatte:
Selvom steering-by-wire teknologien ikke er særlig avanceret, er den blevet brugt i partier på køretøjer. Den tidligere Lexus stødte i hvert fald på mange problemer, da den forsøgte at fange krabber.
Denne form for direkte eliminering af traditionel sensormekanisk kontrol gennem elektriske signaler, selv om den er af høj kvalitet og lav pris, kan også give chauffører en bedre køreoplevelse, men det mest grundlæggende krav til køretøjer er sikkerhed. Der er mange niveauer af fejlfaktorer i elektriske signaler.
Fremme af teknologiske fremskridt kræver markedsverifikation og tager tid. Hvis denne teknologi bliver meget populær i fremtiden, hvis den er stabil, vil den integrerede teknologi i det "elektriske skateboard" blive yderligere forbedret.
Posttid: Apr-01-2024