Lenkung-by-Wire
Cybertruck verwendet eine drahtgesteuerte Rotation, um die traditionelle mechanische Rotationsmethode des Fahrzeugs zu ersetzen und so die Steuerung perfekter zu machen. Dies ist auch ein notwendiger Schritt auf dem Weg zum intelligenten High-End-Fahren.
Was ist ein Steer-by-Wire-System? Vereinfacht ausgedrückt hebt das Steer-by-Wire-System die physische Verbindung zwischen Lenkrad und Rad vollständig auf und nutzt elektrische Signale zur Steuerung der Radlenkung.
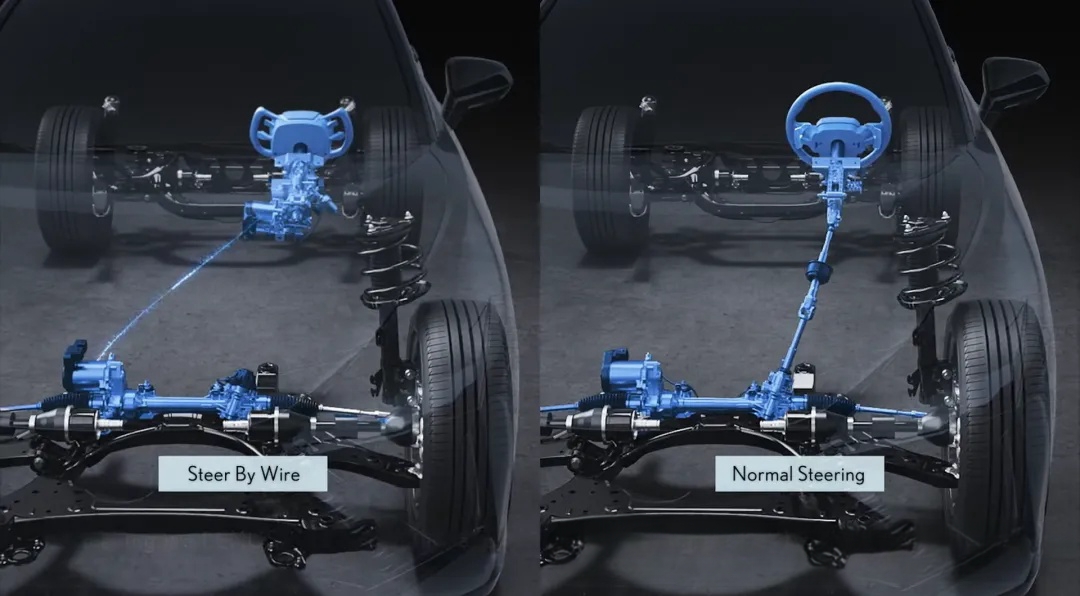
Das Steer-by-Wire-System bietet nicht nur alle Vorteile des herkömmlichen mechanischen Lenksystems, sondern kann auch Winkelübertragungseigenschaften erreichen, die mit mechanischen Systemoptimierungen nur schwer zu erreichen sind.
Das Steer-by-Wire-System ist keine neue Technologie. Verschiedene OEMs haben diese Technologie bereits vor langer Zeit entwickelt, darunter Toyota, Volkswagen, Great Wall, BYD, NIO usw., aber auch die weltbekannten Tier-1-Hersteller Bosch, Continental und ZF entwickeln und implementieren Steer-by-Wire Systeme, aber nur Teslas Cybertruck wurde im eigentlichen Sinne in Massenproduktion gebracht.
Daher ist die spätere Leistung von Cybertruck sehr marktführend. Gleichzeitig ist diese Technologie auch die Kerntechnologie des „Schiebechassis“, daher ist ihr späterer Chargenstatus sehr aussagekräftig.
Obwohl die Steer-by-Wire-Technologie den ursprünglich sperrigeren Übertragungsmechanismus im Vergleich zur herkömmlichen Technologie eliminieren und das Fahrzeug leichter (leicht bedeutet niedrige Kosten und lange Lebensdauer) und kostengünstiger machen kann, überträgt die Elektrifizierung die Steuerung über Signale. Wenn etwas schief geht, werden die Folgen sehr schwerwiegend sein. Als diese Technologie zum ersten Mal in Flugzeugen eingesetzt wurde, wurde daher ein doppelt redundantes Design für eine doppelte Versicherung eingeführt.
Die Steer-by-Wire-Technologie ist derzeit in Fahrzeugen weit verbreitet, hauptsächlich bei Fahrzeugen mit Hinterradantrieb, und wird selten bei Fahrzeugen mit Vorderradantrieb eingesetzt. Der Hauptgrund dafür ist, dass diese Technologie keine Probleme bereiten kann und elektrische Signalausfälle durch viele Faktoren verursacht werden können, wie z. B. durch Ausfälle der Batterie, Verlust der Signalverzögerung usw.
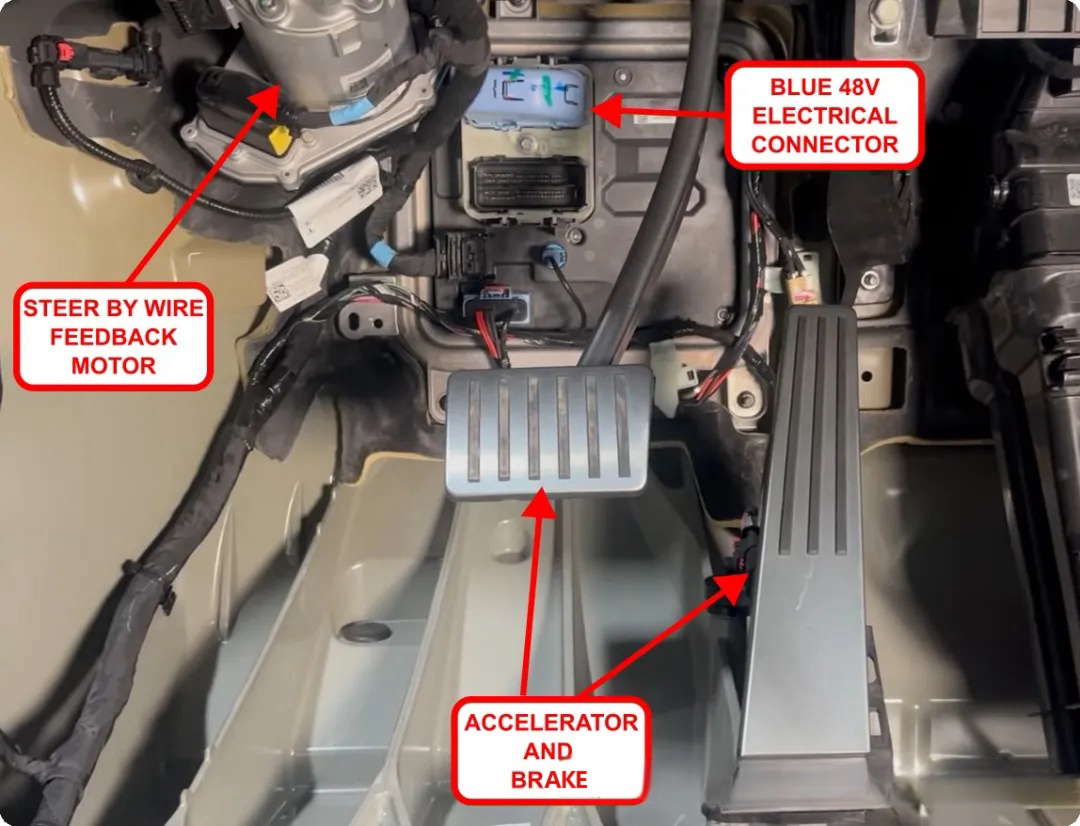
Um zu verhindern, dass der Batterie plötzlich die Energie ausgeht, nutzt Cybertruck nicht nur ein 48-V-Batteriesystem zur Stromversorgung des Motors auf der linken Seite des Bildes unten, sondern verbindet ihn auch mit Hochspannungsstrom. Außerdem gibt es zwei Backup-Batterien, um sicherzustellen, dass die Batterie nicht eingeschaltet wird, und es handelt sich außerdem um ein doppelt redundantes Design.
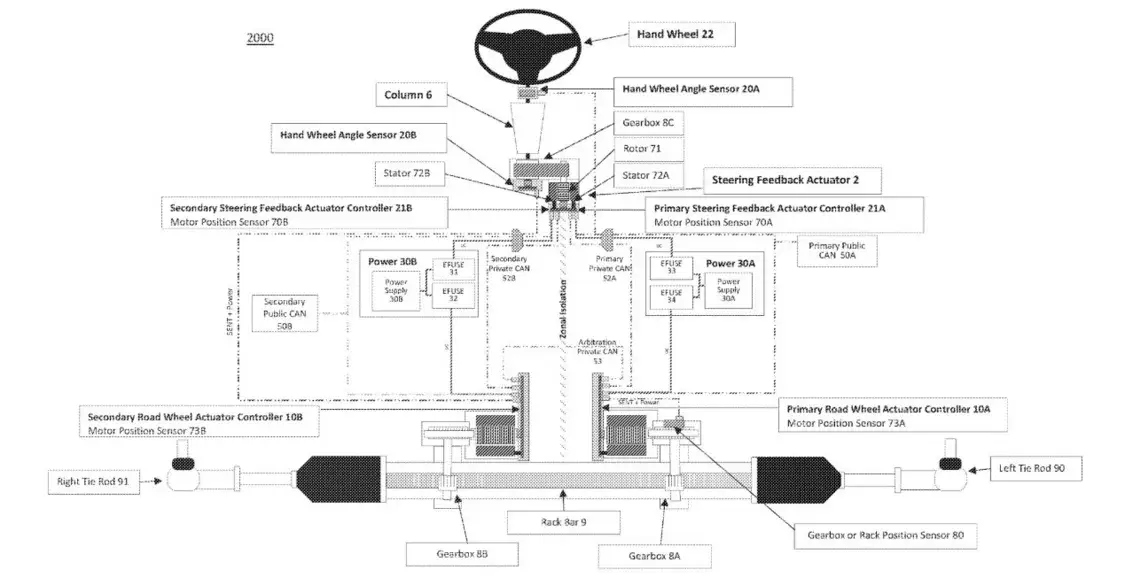
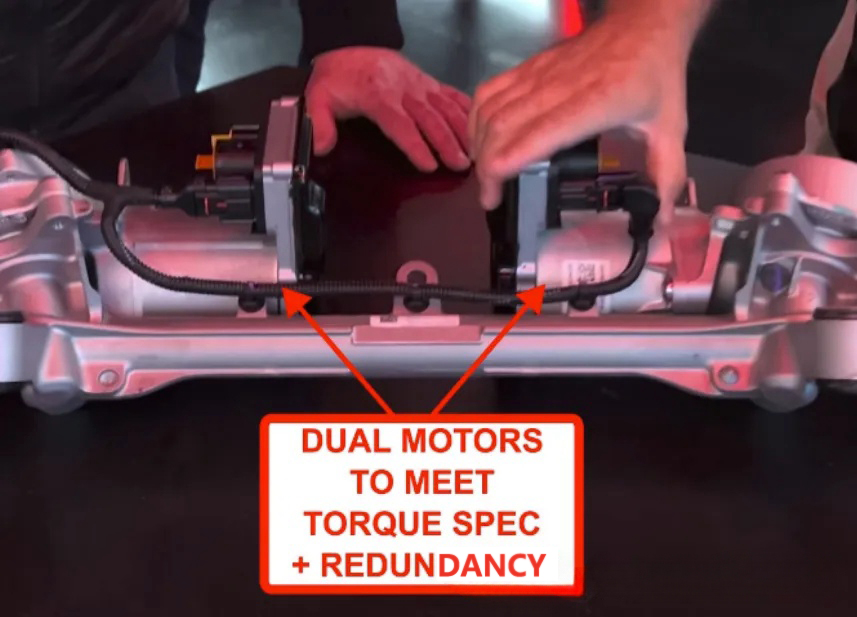
Das Steer-by-Wire-System des Cybertrucks verwendet zwei Motoren, von denen jeder bei Parkbedingungen mit niedriger Geschwindigkeit etwa 50–60 % des maximalen Drehmoments erzeugen kann. Wenn einer ausfällt, steht immer noch ein Motor zur Verfügung, um Redundanz zu gewährleisten. Derselbe Motor (nur einer) wird zum Antrieb des hinteren Lenksystems verwendet. Dieser Motor kann dem Fahrer das Gefühl einer simulierten Rückmeldung geben. Diese Rückmeldung ist sehr wichtig. Ohne diese Rückmeldung kann der Fahrer die Lenkung des Lenkrads schlechter wahrnehmen. Situation und kann außerdem Reifen- und Bodendaten an die Analyseeinheit übertragen, um ein besseres Fahrerlebnis zu ermöglichen. Wenn Sie beispielsweise die Richtung ändern, kann die beste Haftung zwischen den Reifen und dem Boden aufrechterhalten werden.
Da elektrische Signale die herkömmliche mechanische Steuerung ersetzt haben, sind die Wirksamkeit und Aktualität der Signalübertragung sehr wichtig. Cybertruc nutzt Ethernet-Kommunikation als Ersatz für die herkömmliche CAN-Kommunikation. Es verfügt über ein Gigabit-Ethernet-System zum Verschieben von Daten, das den Anforderungen der Hochgeschwindigkeitskommunikation gerecht wird. Das Datennetzwerk hat eine Latenz von nur einer halben Millisekunde, was es ideal für Blinker macht, und es bietet außerdem ausreichend Bandbreite, um verschiedene Controller zu ermöglichen in Echtzeit zu kommunizieren.
Ethernet hat eine höhere Bandbreite als CAN-Kommunikation. Das gesamte Fahrzeug kann sich eine Daisy Chain teilen. Mithilfe der POE-Technologie kann die Ethernet-Schnittstelle direkt mit Strom versorgt werden, ohne dass ein separater Satz Niederspannungsnetzteile erforderlich ist, wodurch die Kosten für den Kabelbaum erheblich gesenkt werden können. Diese Technologie wird mit der schnellen Kommerzialisierung und Implementierung von fahrzeuginternem Ethernet und zukünftigem intelligentem Fahren auch schnell kommerzialisiert und implementiert werden.
Zusammenfassen:
Obwohl die Steering-by-Wire-Technologie noch nicht sehr weit fortgeschritten ist, wurde sie serienmäßig in Fahrzeugen eingesetzt. Zumindest der Vorgänger-Lexus hatte beim Versuch, Krabben zu fangen, viele Probleme.
Diese Art der direkten Eliminierung der herkömmlichen sensormechanischen Steuerung durch elektrische Signale ist zwar von hoher Qualität und niedrigem Preis, kann dem Fahrer jedoch auch ein besseres Fahrerlebnis ermöglichen, aber die grundlegendste Anforderung an Fahrzeuge ist die Sicherheit. Es gibt viele Ebenen von Fehlerfaktoren bei elektrischen Signalen.
Die Förderung des technischen Fortschritts erfordert eine Marktüberprüfung und braucht Zeit. Wenn diese Technologie in Zukunft sehr populär wird und stabil ist, wird die integrierte Technologie des „elektrischen Skateboards“ weiter verbessert.
Zeitpunkt der Veröffentlichung: 01.04.2024