Dirección por cable
Cybertruck utiliza rotación controlada por cable para reemplazar el método tradicional de rotación mecánica del vehículo, haciendo que el control sea más perfecto. Este es también un paso necesario para avanzar hacia la conducción inteligente de alta gama.
¿Qué es un sistema de dirección por cable? En pocas palabras, el sistema de dirección por cable cancela por completo la conexión física entre el volante y el volante y utiliza señales eléctricas para controlar la dirección del volante.
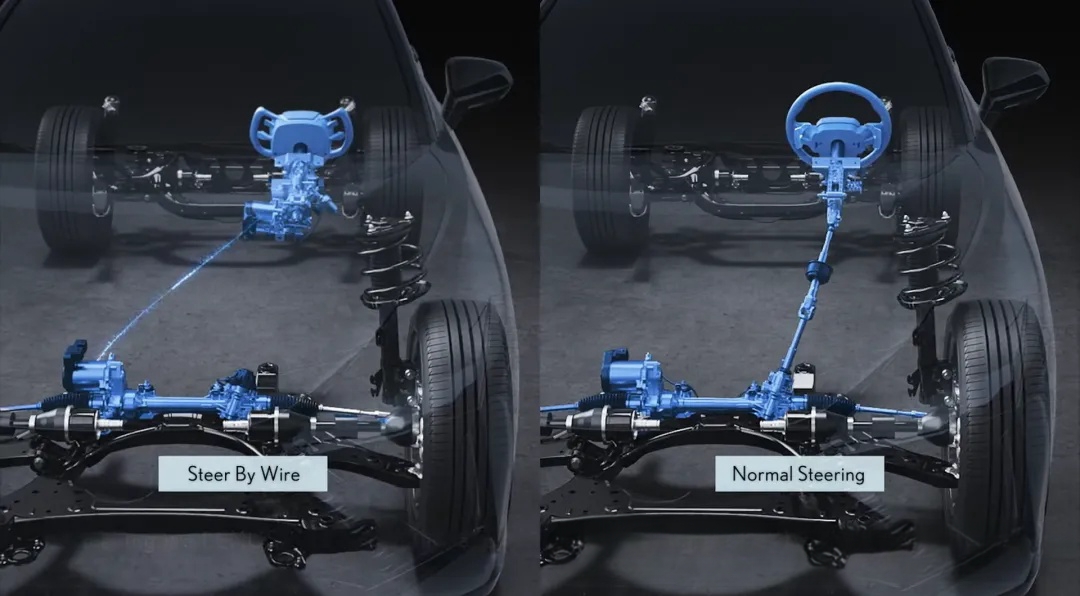
El sistema de dirección por cable no sólo tiene todas las ventajas del sistema de dirección mecánico tradicional sino que también puede lograr características de transmisión angular que son difíciles de lograr con sistemas mecánicos de optimización.
El sistema de dirección por cable no es una tecnología nueva. Varios fabricantes de equipos originales han desarrollado esta tecnología hace mucho tiempo, incluidos Toyota, Volkswagen, Great Wall, BYD, NIO, etc., así como los mundialmente famosos Tier 1 Bosch, Continental y ZF están desarrollando e implementando dirección por cable. sistemas, pero sólo el Cybertruck de Tesla se ha puesto en producción en masa en el verdadero sentido.
Por lo tanto, el desempeño posterior de Cybertruck es muy líder en el mercado. Al mismo tiempo, esta tecnología es también la tecnología central del "chasis deslizante", por lo que su estado de lote posterior es muy significativo.
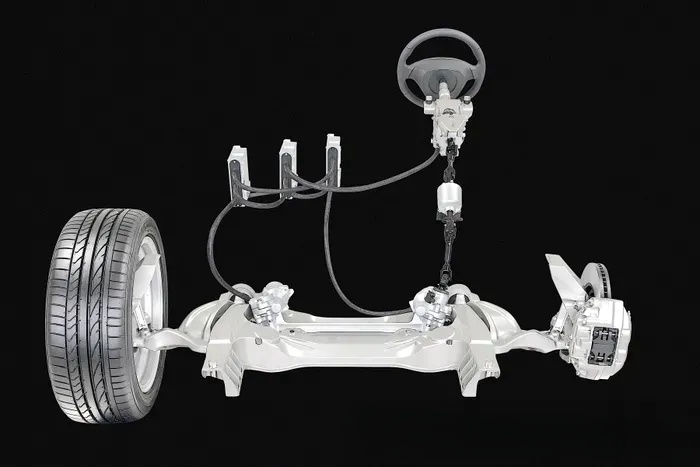
Aunque la tecnología de dirección por cable puede eliminar el mecanismo de transmisión original, más voluminoso en comparación con la tecnología tradicional, y puede hacer que el vehículo sea más liviano (ligero significa bajo costo y larga resistencia) y menor costo, la electrificación transmite el control a través de señales. Si algo sale mal, las consecuencias serán muy graves. Por lo tanto, cuando esta tecnología se utilizó por primera vez en aviones de aviación, adoptó un diseño de doble redundancia para un doble seguro.
La tecnología de dirección por cable se utiliza actualmente ampliamente en vehículos, principalmente en los de tracción trasera, y rara vez se utiliza en los de tracción delantera. La razón principal es que esta tecnología no puede tener ningún problema, y los fallos de la señal eléctrica pueden deberse a muchos aspectos, como cortes de energía de la batería, pérdida de retraso de la señal, etc.
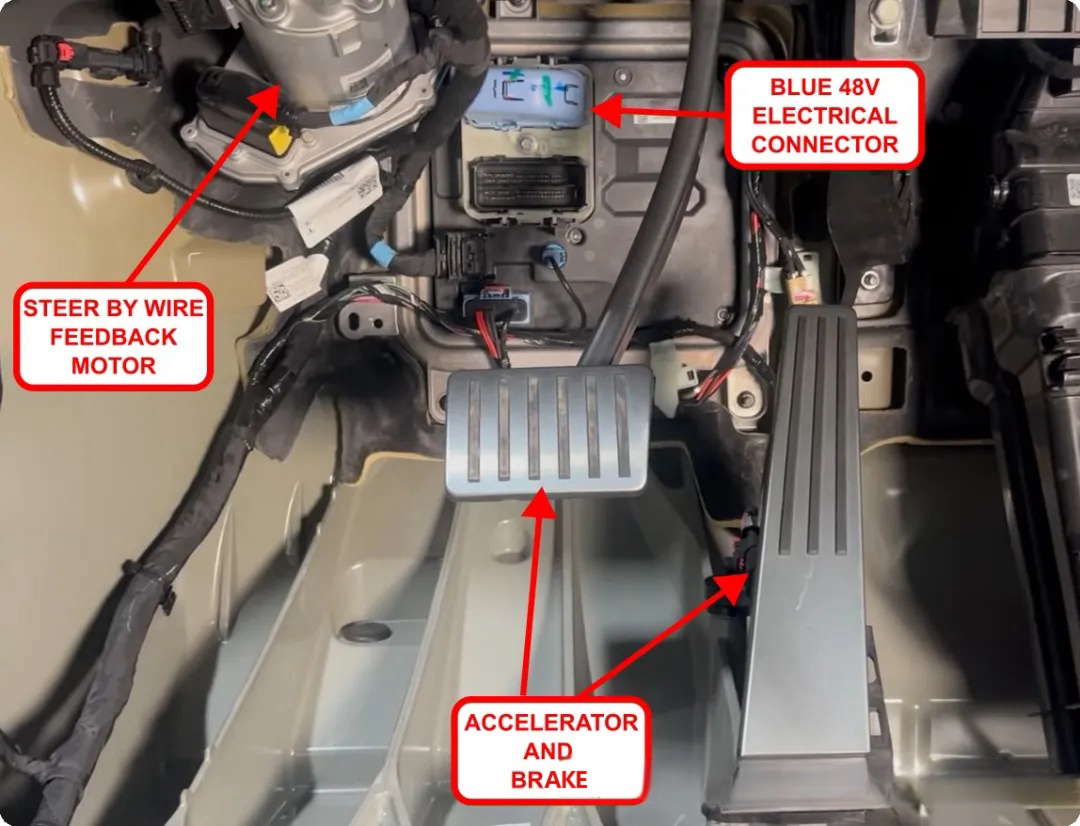
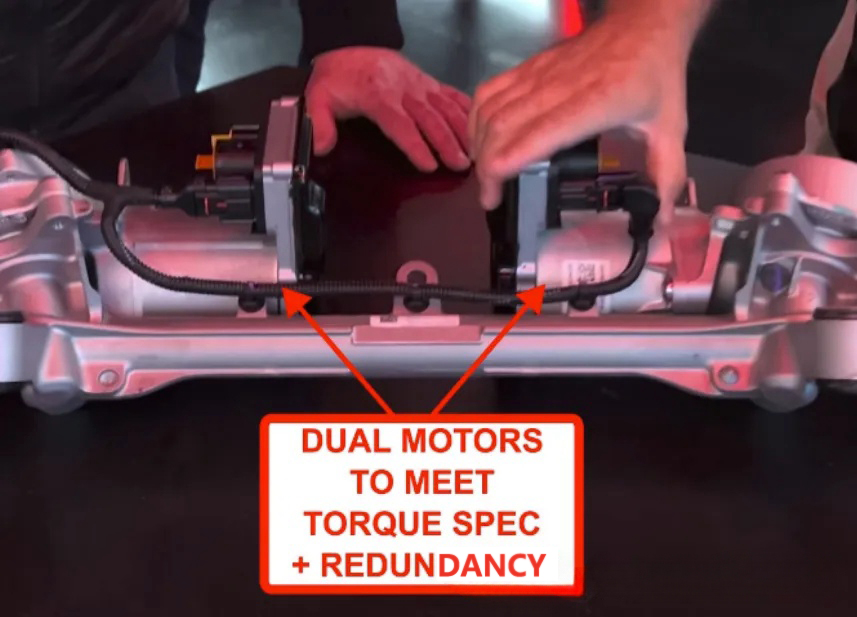
Para evitar que la batería se agote repentinamente, Cybertruck no solo utiliza un sistema de batería de 48 V para alimentar el motor en el lado izquierdo de la imagen a continuación, sino que también se conecta a una fuente de alimentación de alto voltaje. También hay 2 baterías de respaldo para garantizar que la batería no esté encendida y también tiene un diseño doblemente redundante.
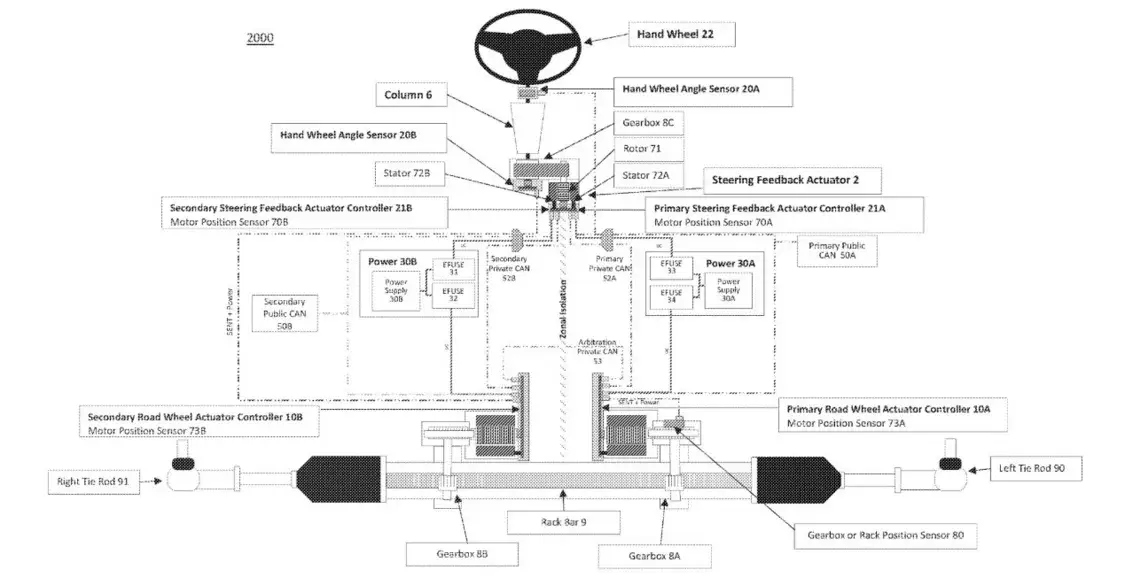
El sistema de dirección por cable del Cybertruck utiliza dos motores, cada uno de ellos capaz de producir aproximadamente entre el 50 y el 60 % del par máximo durante condiciones de estacionamiento a baja velocidad. Si uno falla, todavía hay un motor disponible para proporcionar redundancia. El mismo motor (solo uno) se utiliza para accionar el sistema de dirección trasero. Este motor puede darle al conductor una sensación de retroalimentación simulada. Esta retroalimentación es muy importante. Sin esta información, el conductor es menos capaz de percibir la dirección del volante. situación, y también puede transmitir datos de neumáticos y terreno a la unidad de análisis para proporcionar una mejor experiencia de conducción. Por ejemplo, cuando giras en la dirección, puedes mantener el mejor agarre entre los neumáticos y el suelo.
Dado que las señales eléctricas han reemplazado al control mecánico tradicional, la efectividad y puntualidad de la transmisión de la señal son muy importantes. Cybertruc utiliza la comunicación Ethernet para reemplazar la comunicación CAN tradicional. Cuenta con un sistema Gigabit Ethernet para mover datos, que puede satisfacer las necesidades de comunicación de alta velocidad, la red de datos tiene una latencia de solo medio milisegundo, lo que la hace ideal para señales de giro, y además proporciona suficiente ancho de banda para permitir varios controladores. para comunicarse en tiempo real.
Ethernet tiene un ancho de banda mayor que la comunicación CAN. Todo el vehículo puede compartir una cadena tipo margarita. Al utilizar la tecnología POE, la interfaz Ethernet se puede alimentar directamente sin un conjunto separado de fuentes de alimentación de bajo voltaje, lo que puede reducir en gran medida el costo del mazo de cables. Esta tecnología también se comercializará e implementará rápidamente con la rápida comercialización e implementación de Ethernet en los vehículos y la futura conducción inteligente.
Resumir:
Aunque la tecnología de dirección por cable no es muy avanzada, se ha utilizado en lotes en vehículos. Al menos el Lexus anterior tuvo muchos problemas cuando intentó atrapar cangrejos.
Este tipo de eliminación directa del control mecánico de sensores tradicional mediante señales eléctricas, aunque es de alta calidad y bajo precio, también puede permitir a los conductores tener una mejor experiencia de conducción, pero el requisito más básico para los vehículos es la seguridad. Hay muchos niveles de factores de falla en las señales eléctricas.
Promover el progreso tecnológico requiere verificación del mercado y lleva tiempo. Si esta tecnología se vuelve muy popular en el futuro y es estable, la tecnología integrada del "monopatín eléctrico" se mejorará aún más.
Hora de publicación: 01-abr-2024