Juhtmega juhtimine
Cybertruck kasutab traditsioonilise sõiduki mehaanilise pöörlemismeetodi asendamiseks juhtmega juhitavat pöörlemist, muutes juhtimise täiuslikumaks. See on ka vajalik samm tipptasemel intelligentse sõidu suunas liikumiseks.
Mis on juhtme kaudu juhtimise süsteem? Lihtsamalt öeldes tühistab juhtsüsteem rooli ja ratta vahelise füüsilise ühenduse täielikult ning kasutab ratta juhtimiseks elektrilisi signaale.
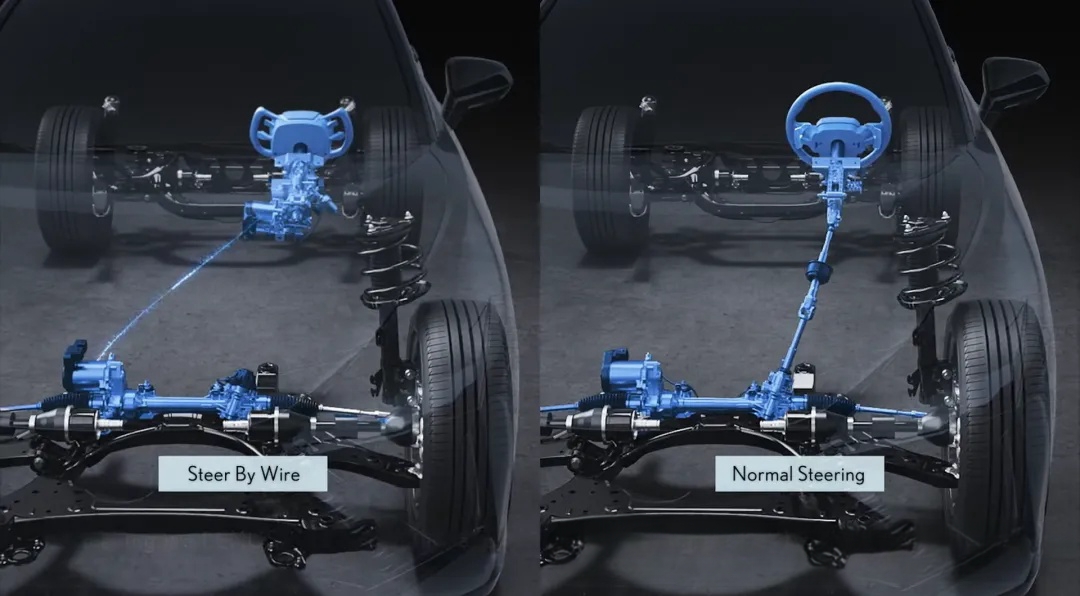
Juhtmepõhisel juhtimissüsteemil pole mitte ainult kõiki traditsioonilise mehaanilise roolisüsteemi eeliseid, vaid see võib saavutada ka nurkülekande omadusi, mida on mehaaniliste süsteemide optimeerimisega raske saavutada.
Juhtmepõhise juhtimise süsteem ei ole uus tehnoloogia. Erinevad originaalseadmete tootjad on selle tehnoloogia juba ammu välja töötanud, sealhulgas Toyota, Volkswagen, Great Wall, BYD, NIO jne, aga ka maailmakuulsad Tier 1 Bosch, Continental ja ZF arendavad ja juurutavad traadiga juhtimist. süsteemid, kuid ainult Tesla Cybertruck on selle tegelikus tähenduses masstootmisse pandud.
Seetõttu on Cybertrucki hilisem jõudlus turuliider. Samal ajal on see tehnoloogia ka "libiseva šassii" põhitehnoloogia, nii et selle järgnev partii olek on väga tähendusrikas.
Kuigi traadi abil juhitav tehnoloogia võib traditsioonilise tehnoloogiaga võrreldes kõrvaldada algse mahukama ülekandemehhanismi ning muuta sõiduki kergemaks (kerge tähendab madalat kulu ja pikka vastupidavust) ja odavamaks, edastab elektrifitseerimine kontrolli signaalide kaudu. Kui midagi läheb valesti, on tagajärjed väga tõsised. Seetõttu, kui seda tehnoloogiat esimest korda lennulennukitel kasutati, võeti topeltkindlustuse jaoks kasutusele topeltliigne disain.
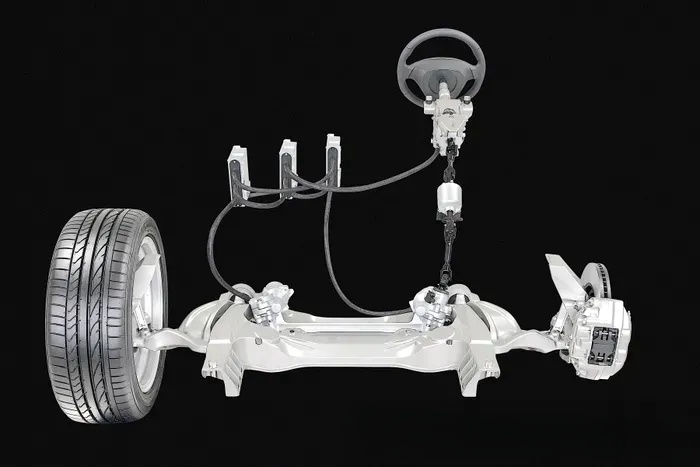
Steer-by-wire tehnoloogiat kasutatakse praegu sõidukites laialdaselt, peamiselt tagaveolistes, ja harva kasutatakse esiveolistel. Peamine põhjus on selles, et sellel tehnoloogial ei saa olla probleeme ning elektrisignaali tõrkeid võivad põhjustada mitmed aspektid, näiteks akutoite katkestused, signaali viivituse kadumine jne.
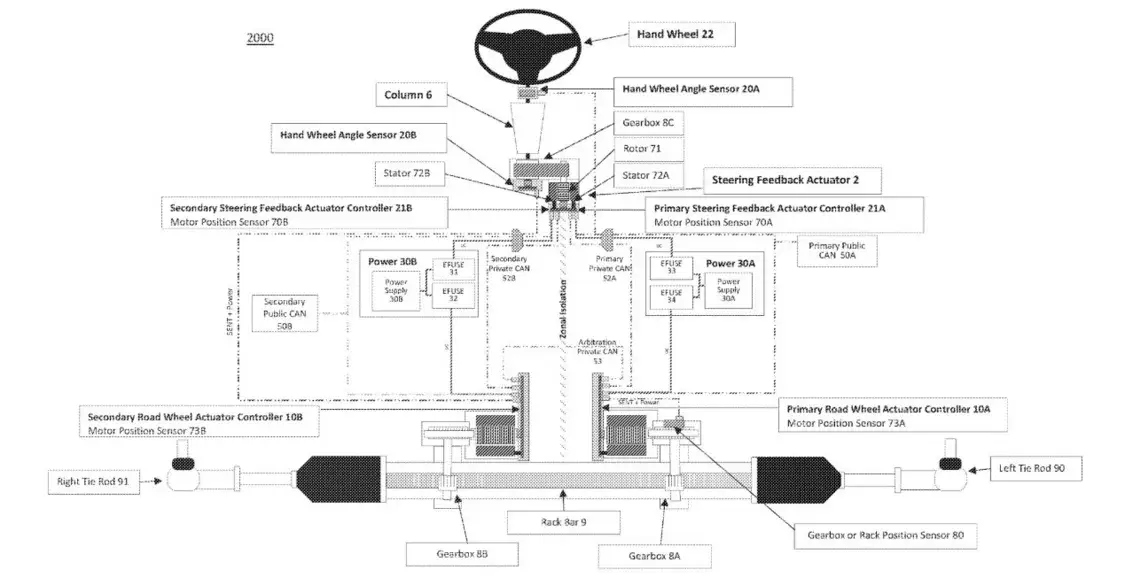
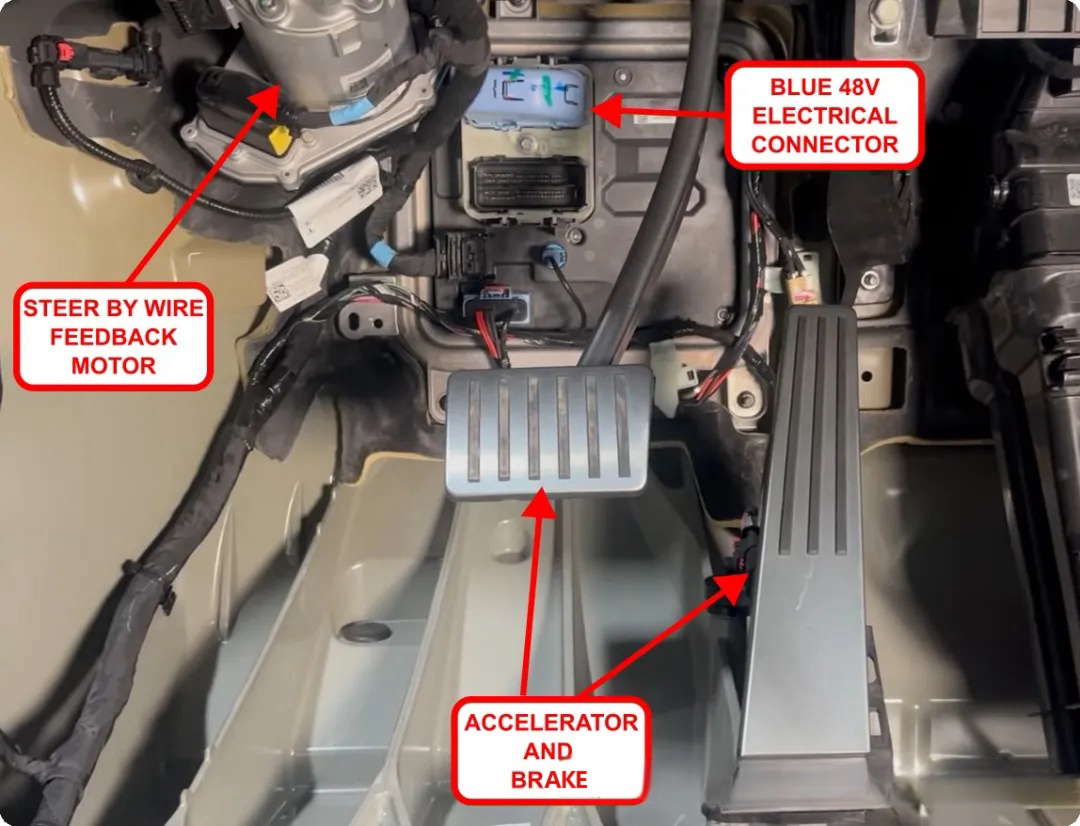
Vältimaks aku ootamatut tühjenemist, ei kasuta Cybertruck mitte ainult 48 V akusüsteemi, et toita alloleval pildil vasakus servas oleva mootoriga, vaid ühendub ka kõrgepinge toiteallikaga. Samuti on 2 varuakut tagamaks, et aku ei oleks sisse lülitatud, ja see on ka topelt üleliigne disain.
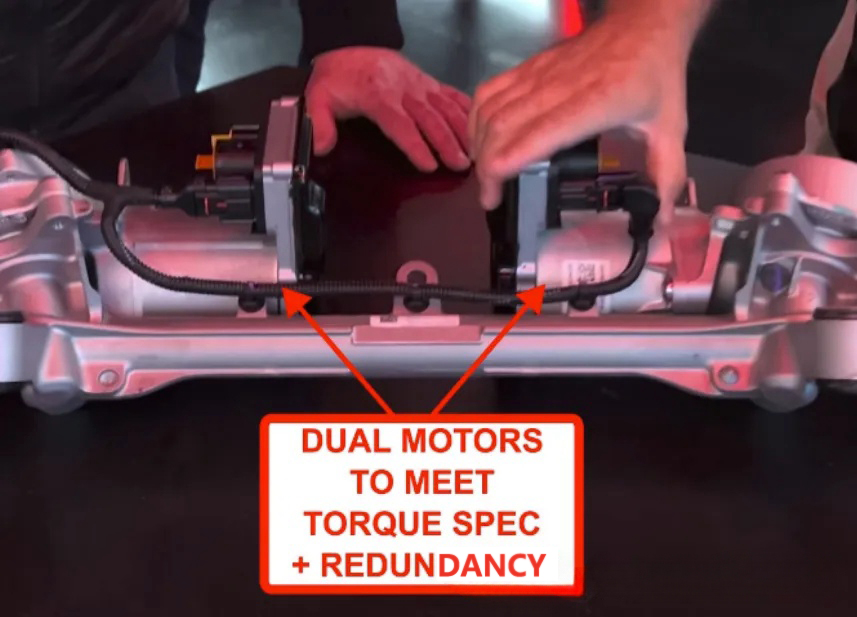
Cybertrucki traadiga juhitav süsteem kasutab kahte mootorit, millest kumbki on võimeline tootma umbes 50–60% maksimaalsest pöördemomendist väikese kiirusega parkimistingimustes. Kui üks ebaõnnestub, on koondamise tagamiseks veel üks mootor saadaval. Sama mootorit (ainult ühte) kasutatakse tagumise roolisüsteemi juhtimiseks. See mootor võib anda juhile simuleeritud tagasiside tunde. See tagasiside on väga oluline. Ilma selle tagasisideta ei taju juht ratta juhtimist. olukord ning see võib parema sõidukogemuse pakkumiseks edastada analüüsiüksusesse ka rehvi- ja pinnaseandmed. Näiteks kui pöörate suunda, suudab see säilitada parima haardumise rehvide ja maapinna vahel.
Kuna elektrilised signaalid on asendanud traditsioonilise mehaanilise juhtimise, on signaali edastamise tõhusus ja õigeaegsus väga oluline. Cybertruc kasutab traditsioonilise CAN-side asendamiseks Etherneti sidet. Sellel on andmete teisaldamiseks Gigabit Etherneti süsteem, mis suudab rahuldada kiire side vajadusi, andmevõrgu latentsusaeg on vaid pool millisekundit, mistõttu on see ideaalne suunatulede jaoks ning see pakub ka piisavat ribalaiust, et võimaldada erinevaid kontrollereid. suhelda reaalajas.
Ethernetil on suurem ribalaius kui CAN-sidel. Kogu sõiduk võib jagada karikakra ketti. POE-tehnoloogiat kasutades saab Etherneti liidest otse toita ilma eraldi madalpinge toiteallikate komplektita, mis võib juhtmestiku kulusid oluliselt vähendada. Seda tehnoloogiat turustatakse kiiresti ja rakendatakse koos sõidukisisese Etherneti ja tulevase nutika sõidu kiire kommertsialiseerimise ja rakendamisega.
Tehke kokkuvõte:
Kuigi juhtmega roolimise tehnoloogia pole eriti arenenud, on seda sõidukitel kasutatud partiidena. Vähemalt eelmisel Lexusel tekkis krabisid püüdes palju probleeme.
Selline traditsioonilise anduri mehaanilise juhtimise otsene kõrvaldamine elektriliste signaalide kaudu, kuigi see on kõrge kvaliteediga ja madala hinnaga, võib samuti võimaldada juhtidel paremat sõidukogemust, kuid sõidukite kõige elementaarsem nõue on ohutus. Elektrilistes signaalides on palju rikketegurite tasemeid.
Tehnoloogilise arengu edendamine nõuab turu kontrollimist ja võtab aega. Kui see tehnoloogia muutub tulevikus väga populaarseks, siis kui see on stabiilne, täiustatakse veelgi "elektrilise rula" integreeritud tehnoloogiat.
Postitusaeg: aprill-01-2024