ղեկ-ըստ մետաղալարով
Cybertruck-ը օգտագործում է մետաղալարով կառավարվող ռոտացիա՝ փոխարինելու ավանդական մեքենայի մեխանիկական պտտման մեթոդը՝ կառավարումը դարձնելով ավելի կատարյալ: Սա նաև անհրաժեշտ քայլ է բարձրակարգ խելացի վարելու համար:
Ի՞նչ է «ղեկ առ մետաղալար» համակարգը: Պարզ ասած, «ղեկ առ լար» համակարգը լիովին չեղարկում է ղեկի և ղեկի ֆիզիկական կապը և օգտագործում է էլեկտրական ազդանշաններ՝ ղեկը կառավարելու համար:
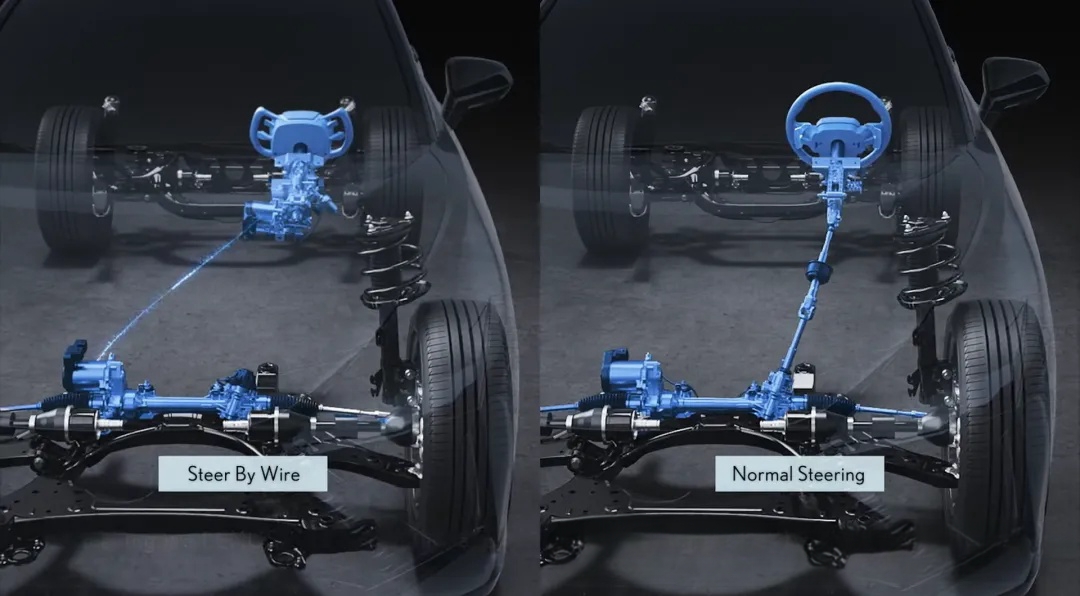
Steer-by-wire համակարգը ոչ միայն ունի ավանդական մեխանիկական ղեկային համակարգի բոլոր առավելությունները, այլև կարող է հասնել անկյունային փոխանցման բնութագրերին, որոնք դժվար է հասնել մեխանիկական համակարգերի օպտիմալացման միջոցով:
Steer-by-wire համակարգը նոր տեխնոլոգիա չէ: Տարբեր OEM-ները վաղուց մշակել են այս տեխնոլոգիան, այդ թվում՝ Toyota-ն, Volkswagen-ը, Great Wall-ը, BYD-ը, NIO-ն և այլն, ինչպես նաև աշխարհահռչակ Tier 1 Bosch-ը, Continental-ը և ZF-ը մշակում և ներդրում են steer-by-wire: համակարգեր, բայց միայն Tesla-ի Cybertruck-ն է զանգվածային արտադրության մեջ դրվել իրական իմաստով:
Հետևաբար, Cybertruck-ի հետագա կատարումը շատ առաջատար է շուկայում: Միևնույն ժամանակ, այս տեխնոլոգիան նաև «լոգարիթմական շասսիի» հիմնական տեխնոլոգիան է, ուստի դրա հետագա խմբաքանակի կարգավիճակը շատ իմաստալից է:
Թեև «ղեկ առ մետաղալար» տեխնոլոգիան կարող է վերացնել փոխանցման սկզբնական ավելի ծավալուն մեխանիզմը՝ համեմատած ավանդական տեխնոլոգիաների հետ, և կարող է մեքենան դարձնել ավելի թեթև (թեթև նշանակում է ցածր գնով և երկար դիմացկունություն) և ավելի ցածր գնով, էլեկտրիֆիկացումը փոխանցում է հսկողությունը ազդանշանների միջոցով: Եթե ինչ-որ բան սխալ լինի, հետեւանքները շատ լուրջ կլինեն։ Հետևաբար, երբ այս տեխնոլոգիան առաջին անգամ կիրառվեց ավիացիոն ինքնաթիռների վրա, այն ընդունեց կրկնակի ավելորդ դիզայն կրկնակի ապահովագրության համար:
Steer-by-wire տեխնոլոգիան ներկայումս լայնորեն կիրառվում է տրանսպորտային միջոցներում, հիմնականում՝ հետևի շարժիչով, և հազվադեպ է օգտագործվում առջևի շարժիչով: Հիմնական պատճառն այն է, որ այս տեխնոլոգիան որևէ խնդիր չի կարող ունենալ, և էլեկտրական ազդանշանի խափանումները կարող են պայմանավորված լինել բազմաթիվ ասպեկտներով, ինչպիսիք են մարտկոցի հոսանքի անջատումները, ազդանշանի հետաձգման կորուստը և այլն:
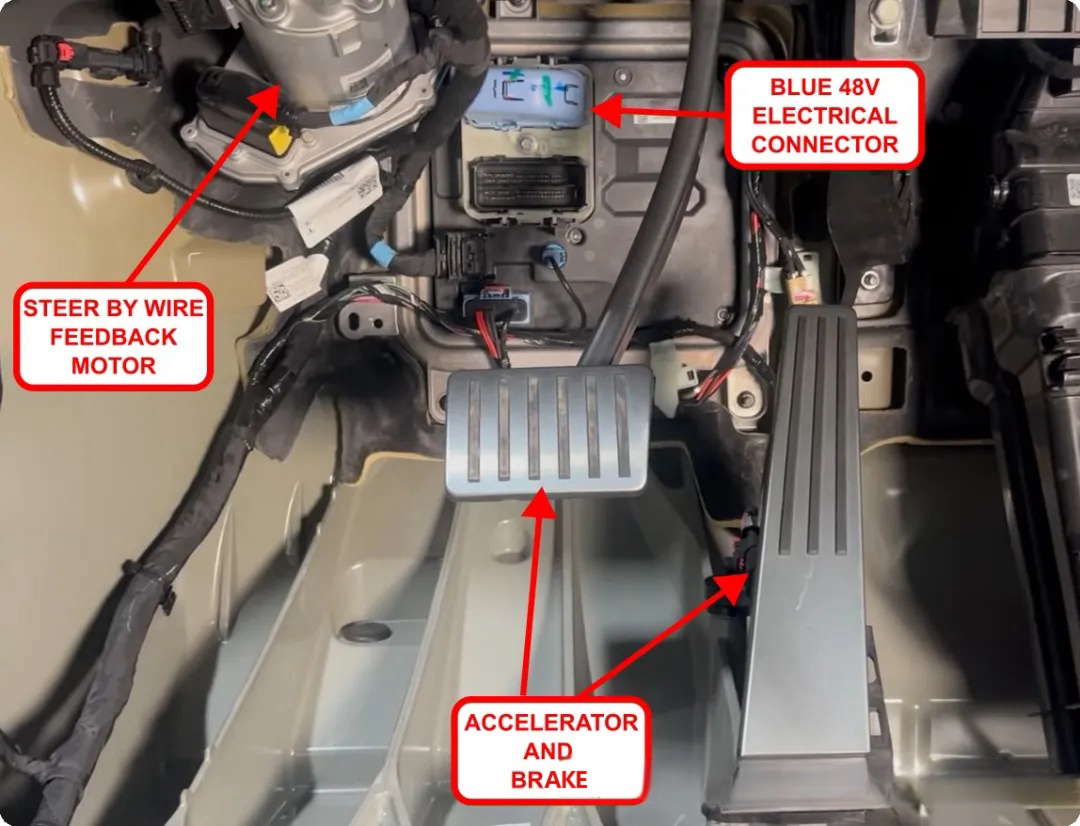
Որպեսզի մարտկոցը հանկարծ չսպառվի, Cybertruck-ը ոչ միայն օգտագործում է 48 Վ մարտկոցի համակարգ ստորև նկարի ձախ կողմում գտնվող շարժիչը սնուցելու համար, այլև միանում է բարձր լարման հոսանքին: Կան նաև 2 պահեստային մարտկոցներ, որոնք ապահովում են, որ մարտկոցը միացված չէ, և դա նաև կրկնակի ավելորդ դիզայն է:
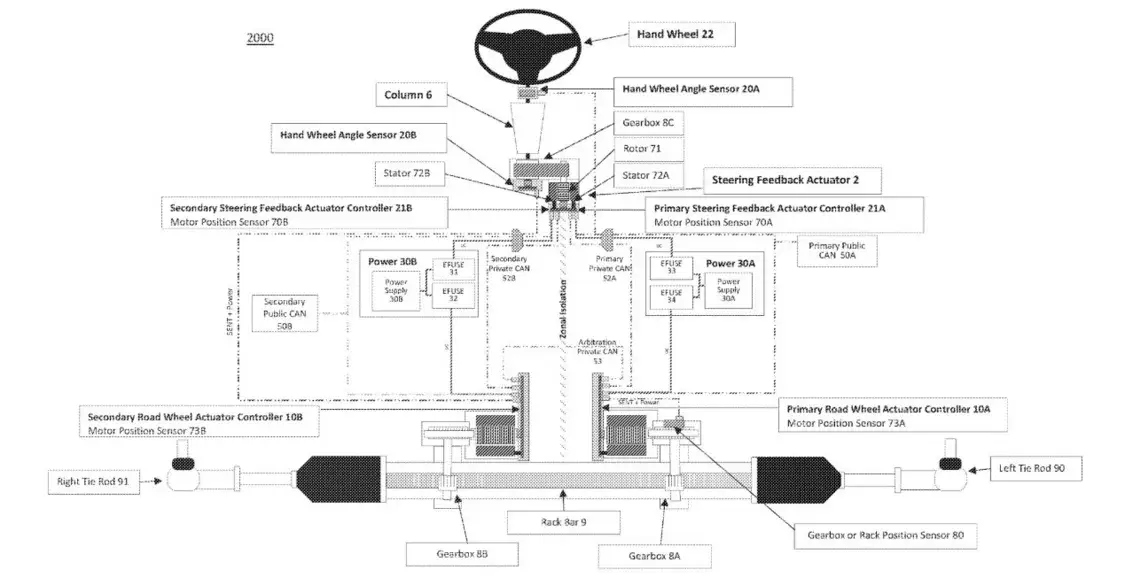
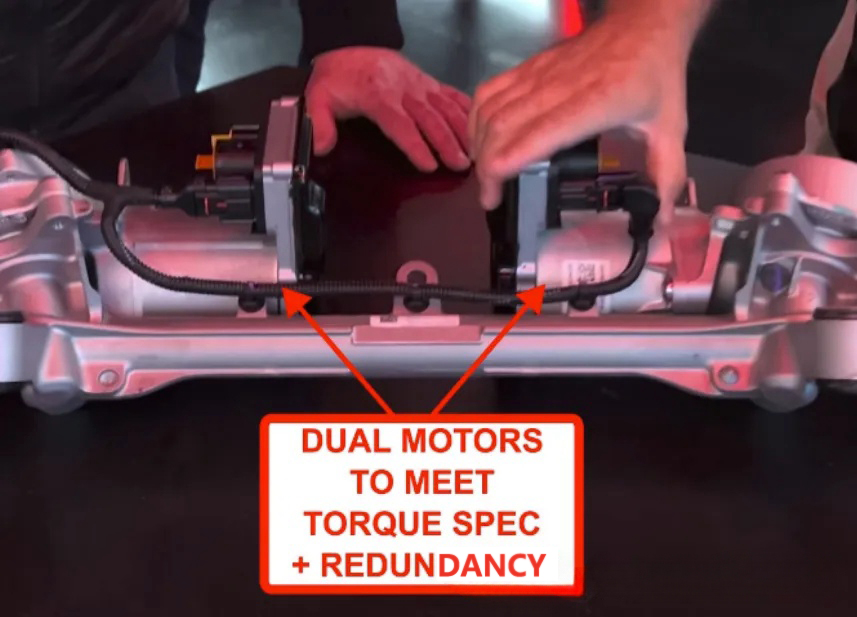
Cybertruck-ի «steer-by-wire» համակարգը օգտագործում է երկու շարժիչ, որոնցից յուրաքանչյուրը կարող է արտադրել առավելագույն պտտող մոմենտների մոտավորապես 50-60%-ը ցածր արագությամբ կայանման պայմաններում: Եթե մեկը ձախողվի, դեռ կա մեկ շարժիչ՝ ավելորդություն ապահովելու համար: Նույն շարժիչը (միայն մեկը) օգտագործվում է հետևի ղեկային համակարգը վարելու համար: Այս շարժիչը կարող է վարորդին տալ նմանակված արձագանքի զգացում: Այս արձագանքը շատ կարևոր է: Առանց այս արձագանքի, վարորդն ավելի քիչ է կարողանում ընկալել ղեկի ղեկը: իրավիճակը, և այն կարող է նաև փոխանցել անվադողերի և հողի տվյալները վերլուծության միավորին՝ ավելի լավ վարելու փորձ ապահովելու համար: Օրինակ, երբ դուք շրջում եք ուղղությունը, այն կարող է պահպանել անվադողերի և գետնի միջև լավագույն ամրությունը:
Քանի որ էլեկտրական ազդանշանները փոխարինել են ավանդական մեխանիկական հսկողությանը, ազդանշանի փոխանցման արդյունավետությունն ու ժամանակին շատ կարևոր են: Cybertruc-ն օգտագործում է Ethernet հաղորդակցությունը՝ փոխարինելու ավանդական CAN հաղորդակցությանը: Այն ունի Gigabit Ethernet համակարգ՝ տվյալների տեղափոխման համար, որը կարող է բավարարել Բարձր արագությամբ հաղորդակցության կարիքները, տվյալների ցանցն ունի ընդամենը կես միլիվայրկյան ուշացում, ինչը այն դարձնում է իդեալական շրջադարձային ազդանշանների համար, ինչպես նաև ապահովում է բավարար թողունակություն՝ թույլ տալու տարբեր կարգավորիչներ: իրական ժամանակում հաղորդակցվելու համար:
Ethernet-ն ունի ավելի մեծ թողունակություն, քան CAN հաղորդակցությունը: Ամբողջ մեքենան կարող է կիսել երիցուկի շղթան: Օգտագործելով POE տեխնոլոգիան, Ethernet ինտերֆեյսը կարող է ուղղակիորեն սնուցվել առանց ցածր լարման սնուցման սարքերի առանձին հավաքածուի, ինչը կարող է զգալիորեն նվազեցնել էլեկտրալարերի արժեքը: Այս տեխնոլոգիան նաև արագորեն կառևտրայնացվի և կիրականացվի մեքենայում Ethernet-ի արագ առևտրայնացման և ներդրման և ապագայում խելացի վարելու միջոցով:
Ամփոփել:
Թեև ղեկային տեխնոլոգիան այնքան էլ առաջադեմ չէ, այն օգտագործվել է մեքենաների խմբաքանակներում: Առնվազն նախորդ Lexus-ը բազմաթիվ խնդիրների է հանդիպել, երբ փորձել է խեցգետիններ բռնել:
Էլեկտրական ազդանշանների միջոցով ավանդական սենսորային մեխանիկական հսկողության այս տեսակ ուղղակի վերացումը, թեև դա բարձր որակ է և ցածր գին, կարող է նաև թույլ տալ վարորդներին ավելի լավ վարելու փորձ ունենալ, բայց տրանսպորտային միջոցների համար ամենահիմնական պահանջը անվտանգությունն է: Էլեկտրական ազդանշանների ձախողման գործոնների բազմաթիվ մակարդակներ կան:
Տեխնոլոգիական առաջընթացի խթանումը պահանջում է շուկայի ստուգում և ժամանակ է պահանջում: Եթե ապագայում այս տեխնոլոգիան շատ տարածված դառնա, եթե այն կայուն լինի, «էլեկտրական սքեյթբորդի» ինտեգրված տեխնոլոգիան էլ ավելի կբարելավվի։
Հրապարակման ժամանակը՝ ապրիլ-01-2024