Steering-By-Wire
Cybertruck bruker wire-kontrollert rotasjon for å erstatte den tradisjonelle kjøretøyets mekaniske rotasjonsmetoden, noe som gjør kontrollen mer perfekt. Dette er også et nødvendig skritt for å gå inn i avansert intelligent kjøring.
Hva er et steer-by-wire-system? Enkelt sagt kansellerer steer-by-wire-systemet fullstendig den fysiske forbindelsen mellom rattet og hjulet og bruker elektriske signaler for å kontrollere hjulstyringen.
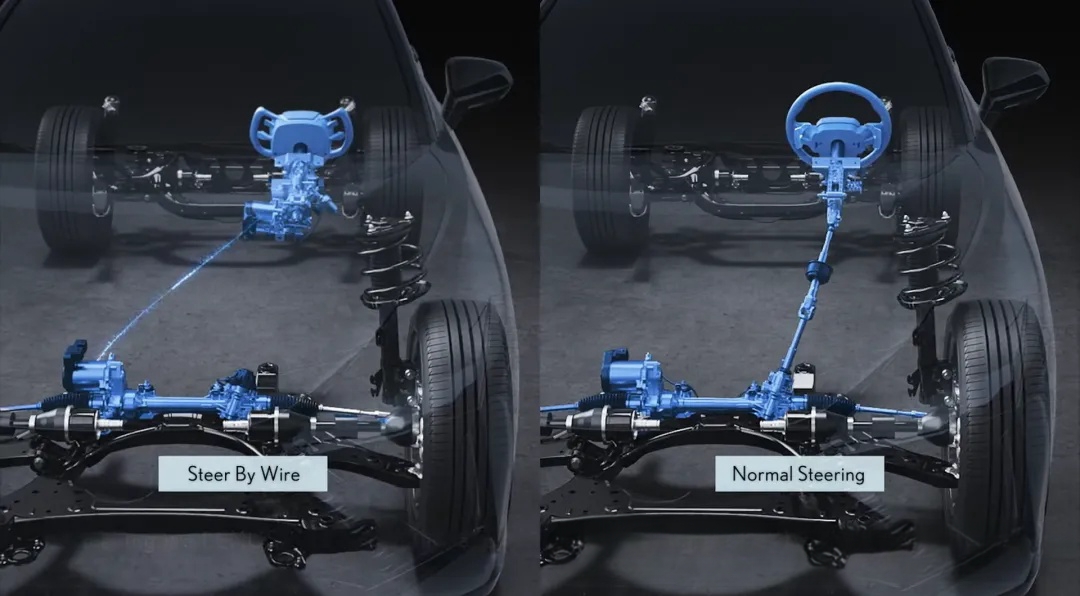
Steer-by-wire-systemet har ikke bare alle fordelene til det tradisjonelle mekaniske styresystemet, men kan også oppnå vinkeltransmisjonsegenskaper som er vanskelige å oppnå med mekaniske systemer Optimalisering.
Steer-by-wire-systemet er ikke en ny teknologi. Ulike OEM-er har utviklet denne teknologien for lenge siden, inkludert Toyota, Volkswagen, Great Wall, BYD, NIO, etc., samt verdenskjente Tier 1 Bosch, Continental og ZF utvikler og implementerer steer-by-wire systemer, men kun Teslas Cybertruck er satt i masseproduksjon i egentlig forstand.
Derfor er den påfølgende ytelsen til Cybertruck veldig markedsledende. Samtidig er denne teknologien også kjerneteknologien til "skyve chassis", så den påfølgende batchstatusen er veldig meningsfull.
Selv om steer-by-wire-teknologi kan eliminere den originale bulkere overføringsmekanismen sammenlignet med tradisjonell teknologi og kan gjøre kjøretøyet lettere (lett betyr lav kostnad og lang utholdenhet) og lavere kostnad, overfører elektrifisering kontroll gjennom signaler. Hvis noe går galt, vil konsekvensene være svært alvorlige. Derfor, da denne teknologien først ble brukt på luftfartsfly, tok den i bruk en dobbel redundant design for dobbel forsikring.
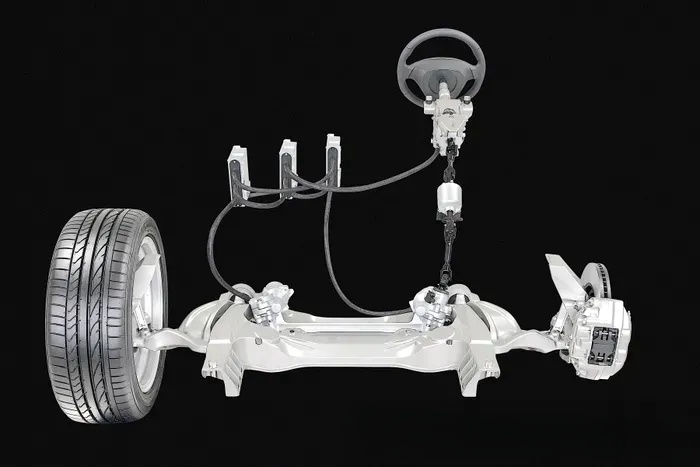
Steer-by-wire-teknologi er for tiden mye brukt i kjøretøy, hovedsakelig i bakhjulsdrift, og brukes sjelden i forhjulsdrift. Hovedårsaken er at denne teknologien ikke kan ha noen problemer, og elektriske signalfeil kan være forårsaket av mange aspekter, for eksempel batteristrømbrudd, signalforsinkelsen går tapt, etc.
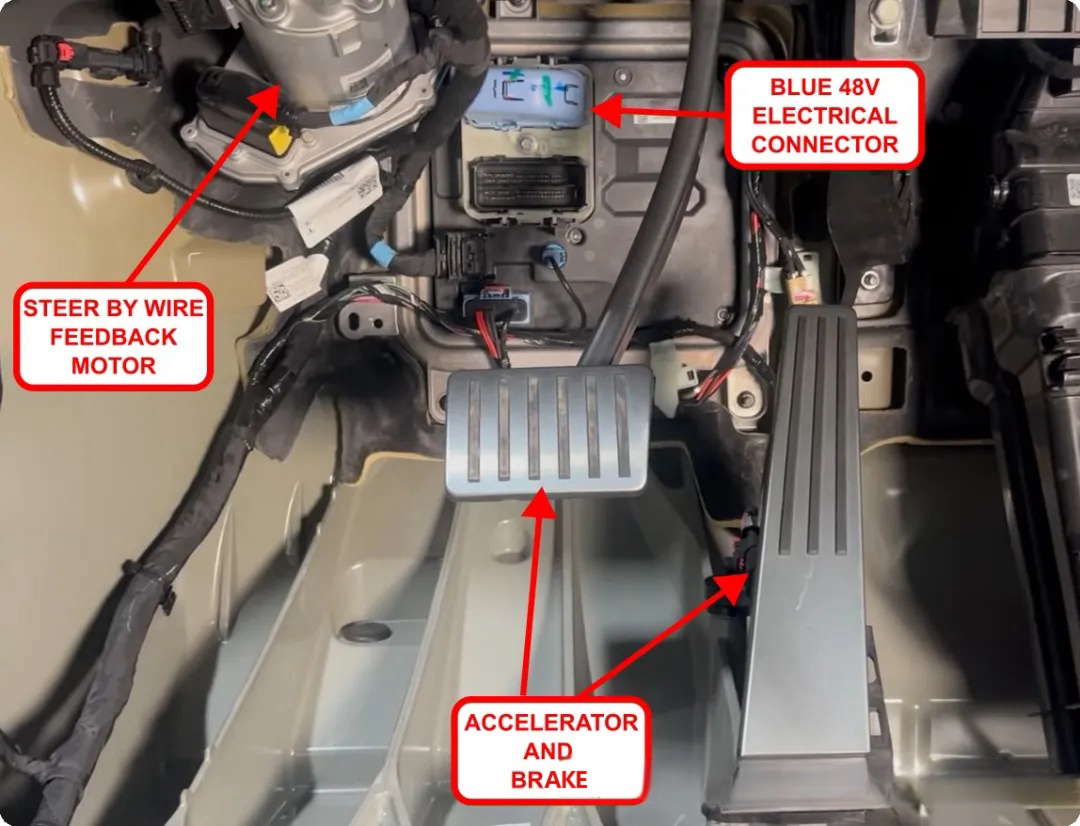
For å forhindre at batteriet plutselig går tom for strøm, bruker Cybertruck ikke bare et 48V batterisystem for å drive motoren på venstre side av bildet nedenfor, men kobler også til høyspentstrøm. Det er også 2 backup-batterier for å sikre at batteriet ikke er slått på, og det er også en dobbel redundant design.
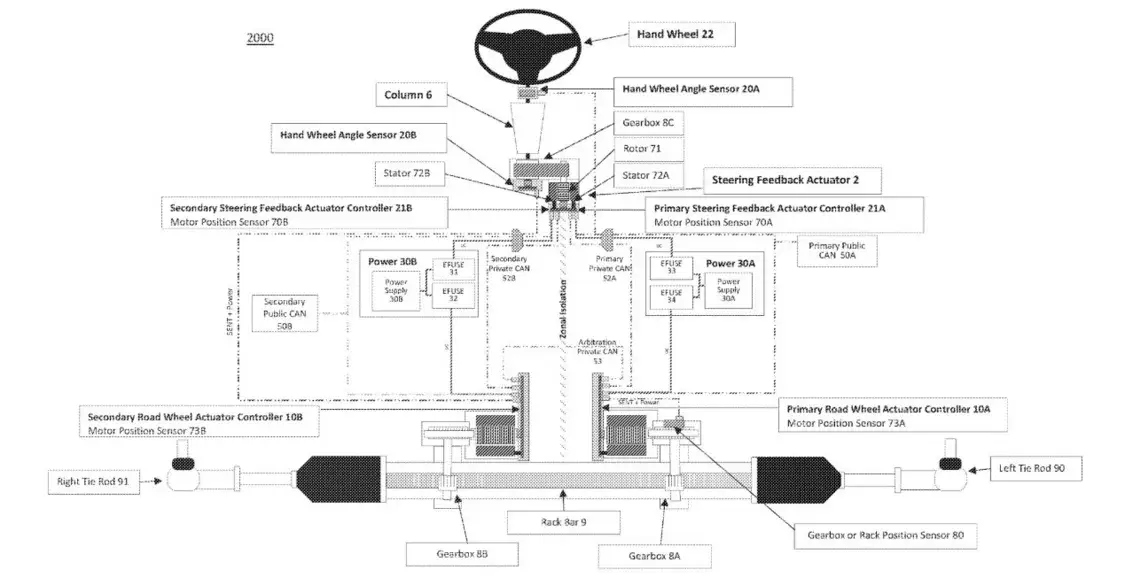
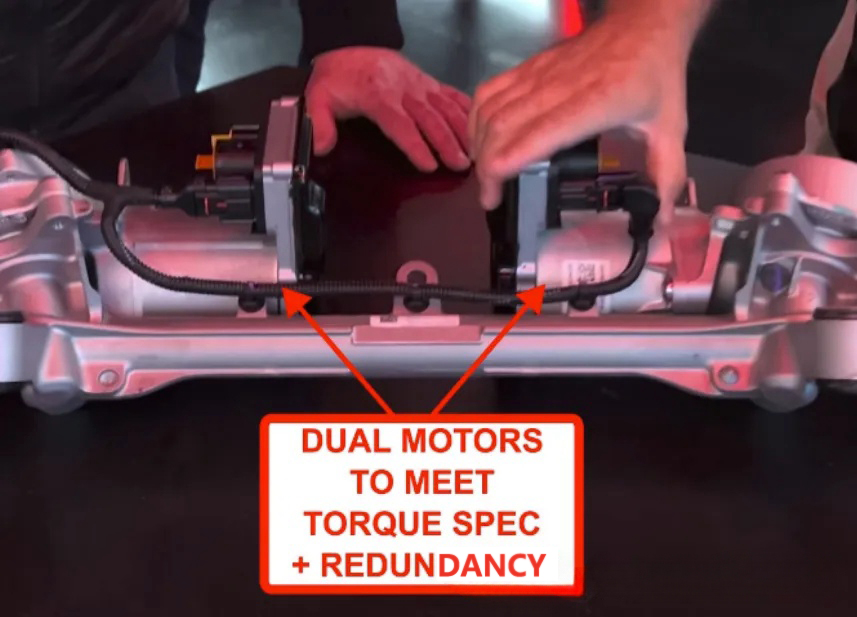
Cybertruckens steer-by-wire-system bruker to motorer, som hver er i stand til å produsere omtrent 50-60 % av maksimalt dreiemoment under lavhastighets parkeringsforhold. Hvis en feiler, er det fortsatt én motor tilgjengelig for å gi redundans. Den samme motoren (bare én) brukes til å drive det bakre styresystemet. Denne motoren kan gi føreren en følelse av simulert tilbakemelding. Denne tilbakemeldingen er veldig viktig. Uten denne tilbakemeldingen er føreren mindre i stand til å oppfatte rattet. situasjon, og den kan også overføre dekk- og bakkedata til analyseenheten for å gi en bedre kjøreopplevelse. Når du for eksempel snur retningen, kan den opprettholde det beste grepet mellom dekkene og underlaget.
Siden elektriske signaler har erstattet tradisjonell mekanisk kontroll, er effektiviteten og aktualiteten til signaloverføring svært viktig. Cybertruc bruker Ethernet-kommunikasjon for å erstatte tradisjonell CAN-kommunikasjon. Den har et Gigabit Ethernet-system for å flytte data, som kan møte behovene til høyhastighetskommunikasjon, datanettverket har en ventetid på bare et halvt millisekund, noe som gjør det ideelt for blinklys, og det gir også tilstrekkelig båndbredde til å tillate forskjellige kontrollere å kommunisere i sanntid.
Ethernet har høyere båndbredde enn CAN-kommunikasjon. Hele kjøretøyet kan dele en kjede. Ved hjelp av POE-teknologi kan Ethernet-grensesnittet drives direkte uten et separat sett med lavspente strømforsyninger, noe som kan redusere kostnadene for ledningsnettet betraktelig. Denne teknologien vil også raskt kommersialiseres og implementeres med rask kommersialisering og implementering av Ethernet i kjøretøy og fremtidig smart kjøring.
Oppsummer:
Selv om steering-by-wire-teknologien ikke er veldig avansert, har den blitt brukt i partier på kjøretøy. Den forrige Lexusen møtte i hvert fall mange problemer da den prøvde å fange krabber.
Denne typen direkte eliminering av tradisjonell sensormekanisk kontroll gjennom elektriske signaler, selv om den er av høy kvalitet og lav pris, kan også tillate sjåfører å få en bedre kjøreopplevelse, men det mest grunnleggende kravet til kjøretøy er sikkerhet. Det er mange nivåer av feilfaktorer i elektriske signaler.
Å fremme teknologisk fremgang krever markedsverifisering og tar tid. Hvis denne teknologien blir veldig populær i fremtiden, hvis den er stabil, vil den integrerte teknologien til "elektrisk skateboard" bli ytterligere forbedret.
Innleggstid: 01-04-2024