Sterowanie przewodowe
Cybertruck wykorzystuje rotację sterowaną przewodowo, aby zastąpić tradycyjną metodę rotacji mechanicznej pojazdu, dzięki czemu sterowanie jest doskonalsze. Jest to również niezbędny krok, aby przejść do zaawansowanej inteligentnej jazdy.
Co to jest system sterowany przewodowo? Mówiąc najprościej, system steer-by-wire całkowicie znosi fizyczne połączenie między kierownicą a kołem i wykorzystuje sygnały elektryczne do sterowania kierownicą.
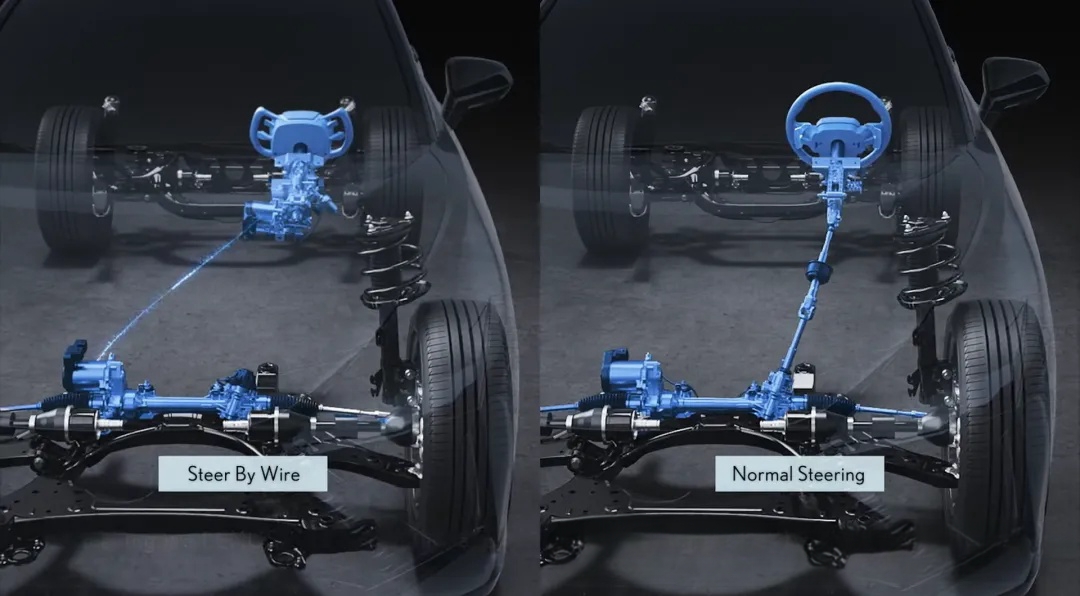
Układ steer-by-wire nie tylko ma wszystkie zalety tradycyjnego mechanicznego układu kierowniczego, ale także pozwala uzyskać charakterystykę przekładni kątowej, która jest trudna do osiągnięcia w przypadku optymalizacji układów mechanicznych.
System steer-by-wire nie jest nową technologią. Różni producenci OEM opracowali tę technologię dawno temu, w tym Toyota, Volkswagen, Great Wall, BYD, NIO itp., a także światowej sławy Tier 1 Bosch, Continental i ZF opracowują i wdrażają technologię steer-by-wire systemów, ale tylko Cybertruck Tesli został wprowadzony do masowej produkcji w prawdziwym tego słowa znaczeniu.
Dlatego późniejsze wyniki Cybertrucka są bardzo wiodące na rynku. Jednocześnie technologia ta jest również podstawową technologią „podwozia przesuwnego”, więc jej późniejszy status partii jest bardzo znaczący.
Chociaż technologia sterowana przewodowo może wyeliminować oryginalny, bardziej masywny mechanizm przekładni w porównaniu z tradycyjną technologią i może sprawić, że pojazd będzie lżejszy (lekkość oznacza niski koszt i długą trwałość), a także niższy koszt, elektryfikacja przekazuje sterowanie za pomocą sygnałów. Jeśli coś pójdzie nie tak, konsekwencje będą bardzo poważne. Dlatego też, gdy technologię tę po raz pierwszy zastosowano w samolotach lotniczych, przyjęto podwójnie redundantną konstrukcję zapewniającą podwójne ubezpieczenie.
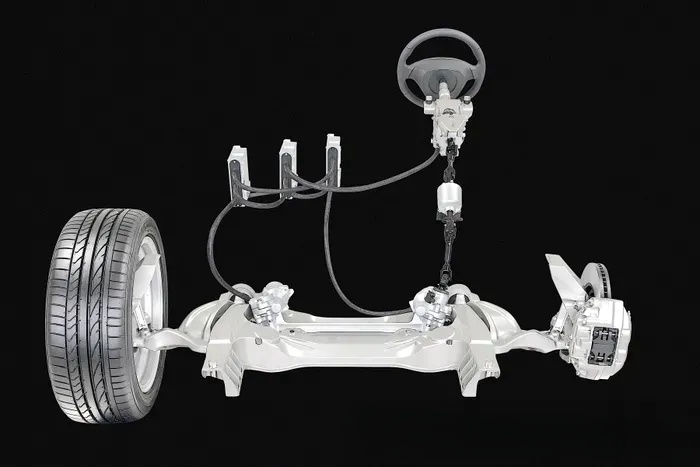
Technologia Steer-by-Wire jest obecnie szeroko stosowana w pojazdach, głównie w przypadku napędu na tylne koła, natomiast rzadko jest stosowana w przypadku napędu na przednie koła. Głównym powodem jest to, że technologia ta nie stwarza żadnych problemów, a awarie sygnału elektrycznego mogą być spowodowane wieloma czynnikami, takimi jak przerwy w zasilaniu baterii, utrata opóźnienia sygnału itp.
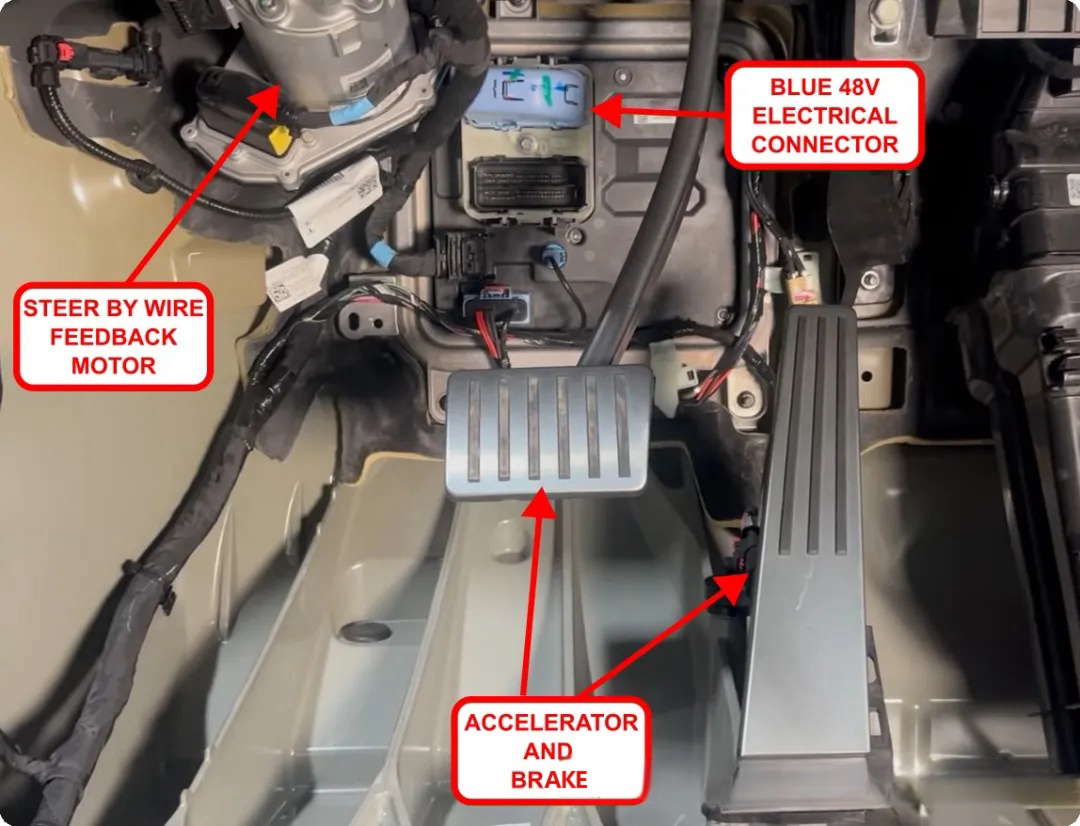
Aby zapobiec nagłemu wyczerpaniu się akumulatora, Cybertruck nie tylko wykorzystuje system akumulatorów 48 V do zasilania silnika widocznego po lewej stronie poniższego zdjęcia, ale także łączy się z zasilaniem wysokiego napięcia. Istnieją również 2 akumulatory zapasowe, które zapewniają, że akumulator nie będzie włączony, a także jest to konstrukcja podwójnie nadmiarowa.
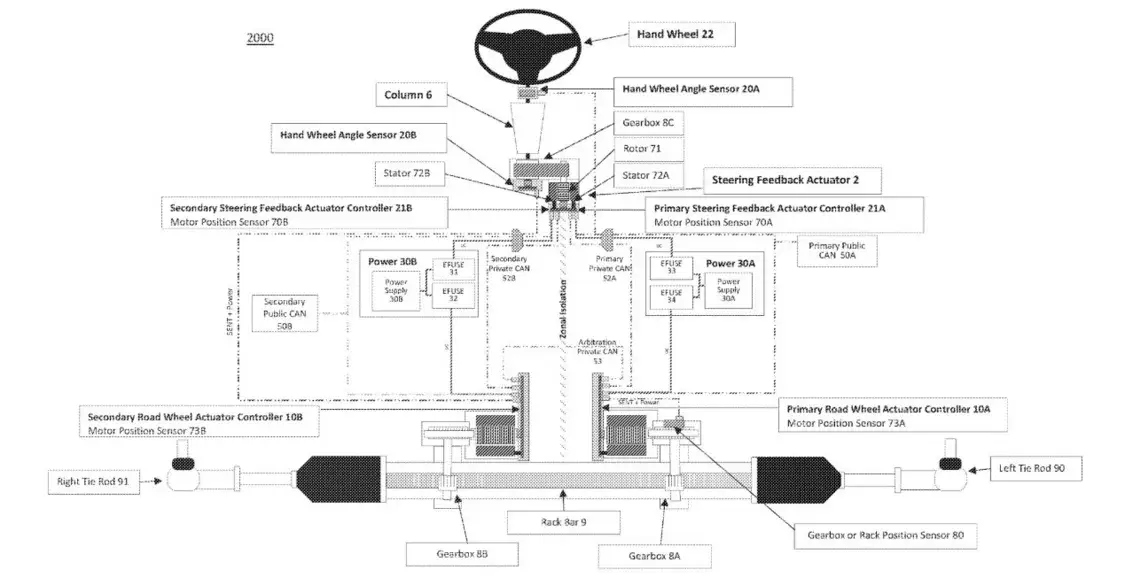
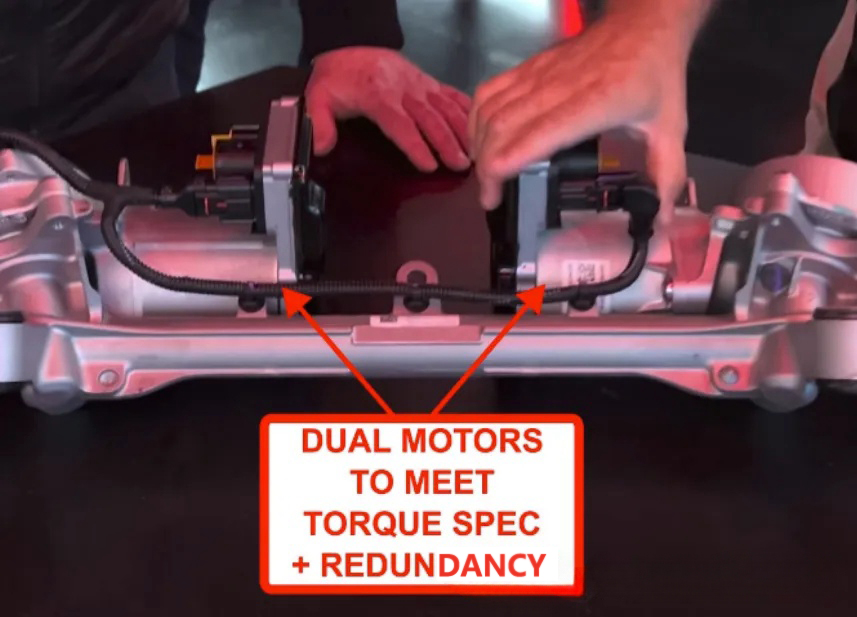
System sterowania przewodowego Cybertrucka wykorzystuje dwa silniki, z których każdy jest w stanie wytworzyć około 50–60% maksymalnego momentu obrotowego podczas parkowania przy niskiej prędkości. W przypadku awarii jednego z nich dostępny jest jeszcze jeden silnik zapewniający redundancję. Ten sam silnik (tylko jeden) napędza tylny układ kierowniczy. Silnik ten może dać kierowcy wrażenie symulowanego sprzężenia zwrotnego. To sprzężenie zwrotne jest bardzo ważne. Bez tej informacji zwrotnej kierowca jest mniej w stanie dostrzec sterowanie kierownicą. sytuacji, a także może przesyłać dane dotyczące opon i podłoża do jednostki analitycznej, aby zapewnić lepsze wrażenia z jazdy. Na przykład, gdy zmienisz kierunek, może utrzymać najlepszą przyczepność między oponami a podłożem.
Ponieważ sygnały elektryczne zastąpiły tradycyjne sterowanie mechaniczne, bardzo ważna jest skuteczność i terminowość transmisji sygnału. Cybertruc wykorzystuje komunikację Ethernet w celu zastąpienia tradycyjnej komunikacji CAN. Posiada system Gigabit Ethernet do przesyłania danych, który może zaspokoić potrzeby szybkiej komunikacji, sieć danych ma opóźnienie tylko pół milisekundy, dzięki czemu idealnie nadaje się do kierunkowskazów, a także zapewnia wystarczającą przepustowość, aby umożliwić różnym kontrolerom komunikować się w czasie rzeczywistym.
Ethernet ma większą przepustowość niż komunikacja CAN. Cały pojazd może dzielić łańcuch. Dzięki technologii POE interfejs Ethernet może być zasilany bezpośrednio bez konieczności stosowania osobnego zestawu zasilaczy niskonapięciowych, co może znacznie obniżyć koszt wiązki przewodów. Technologia ta zostanie również szybko skomercjalizowana i wdrożona wraz z szybką komercjalizacją i wdrażaniem pokładowego Ethernetu oraz przyszłej inteligentnej jazdy.
Streszczać:
Choć technologia sterowania przewodowego nie jest zbyt zaawansowana, znalazła zastosowanie masowo w pojazdach. Przynajmniej poprzedni Lexus napotkał wiele problemów, gdy próbował złapać kraby.
Ten rodzaj bezpośredniej eliminacji tradycyjnego sterowania mechanicznego czujnikami za pomocą sygnałów elektrycznych, mimo że charakteryzuje się wysoką jakością i niską ceną, może również zapewnić kierowcom lepsze wrażenia z jazdy, ale najbardziej podstawowym wymogiem stawianym pojazdom jest bezpieczeństwo. Istnieje wiele poziomów czynników awarii w sygnałach elektrycznych.
Promowanie postępu technologicznego wymaga weryfikacji rynkowej i wymaga czasu. Jeśli technologia ta stanie się w przyszłości bardzo popularna, jeśli będzie stabilna, zintegrowana technologia „deskorolki elektrycznej” zostanie jeszcze udoskonalona.
Czas publikacji: 01 kwietnia 2024 r