Руль
Кибертрук чыбык белән идарә ителгән әйләнешне традицион машинаның механик әйләнү ысулын алыштыру өчен куллана, контрольне камилләштерә. Бу шулай ук югары дәрәҗәдәге акыллы машина йөртүгә күчү өчен кирәкле адым.
Руль-чыбык системасы нәрсә ул? Гади генә итеп әйткәндә, руль системасы руль белән тәгәрмәч арасындагы физик бәйләнешне тулысынча юкка чыгара һәм руль белән идарә итү өчен электр сигналларын куллана.
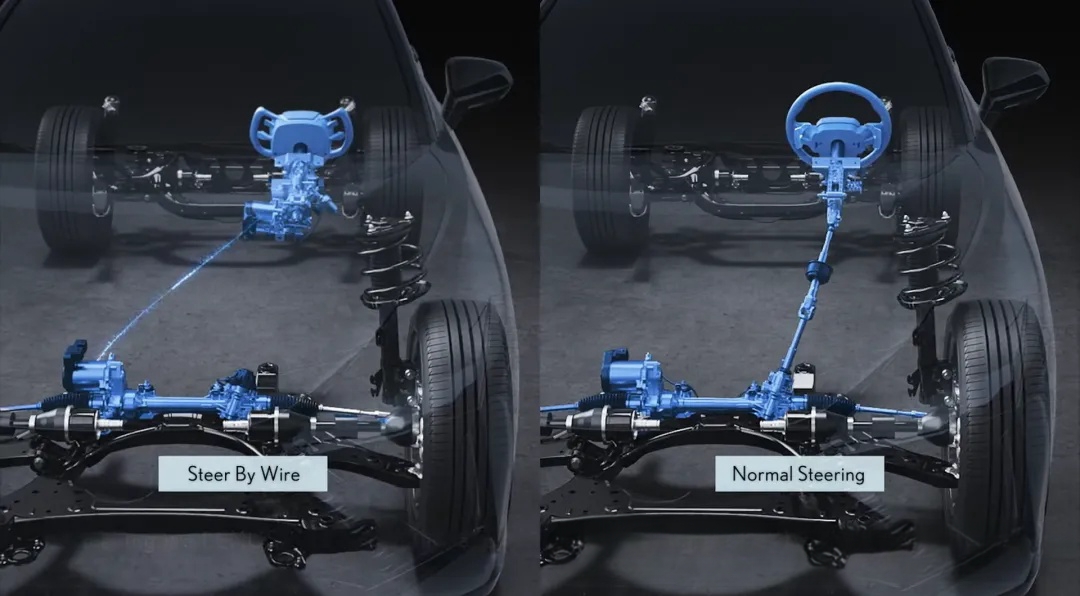
Руль-чыбык системасы традицион механик руль системасының барлык өстенлекләренә генә түгел, ә механик системаларны оптимизацияләүгә ирешү кыен булган почмак тапшыру үзенчәлекләренә дә ирешә ала.
Руль белән идарә итү яңа технология түгел. Төрле OEMлар бу технологияне күптән эшләделәр, алар арасында Тойота, Фольксваген, Зур Дивар, BYD, NIO һ.б., шулай ук дөньякүләм танылган 1-нче дәрәҗә Bosch, Континенталь һәм ZF руль-чыбыкны үстерәләр һәм тормышка ашыралар. системалары, ләкин чын мәгънәсендә массакүләм җитештерүгә Тесланың Кибертрук кына кертелде.
Шуңа күрә, Кибертрукның алдагы чыгышы бик базарда алдынгы. Шул ук вакытта, бу технология шулай ук "слайд шасси" ның төп технологиясе, шуңа күрә аның киләсе партия статусы бик мәгънәле.
Традицион технологияләр белән чагыштырганда, руль-чыбык технологиясе оригиналь тапшыру механизмын юкка чыгара ала һәм машинаны җиңелрәк итә ала (яктылык аз чыгымлы һәм озак чыдамлылык дигәнне аңлата) һәм арзанрак бәядә, электрлаштыру сигналлар аша контрольне җибәрә. Әгәр дә берәр нәрсә дөрес булмаса, нәтиҗәләре бик җитди булачак. Шуңа күрә, бу технология беренче тапкыр авиация самолетларында кулланылгач, икеләтә иминиятләштерү өчен икеләтә артык дизайн кабул итте.
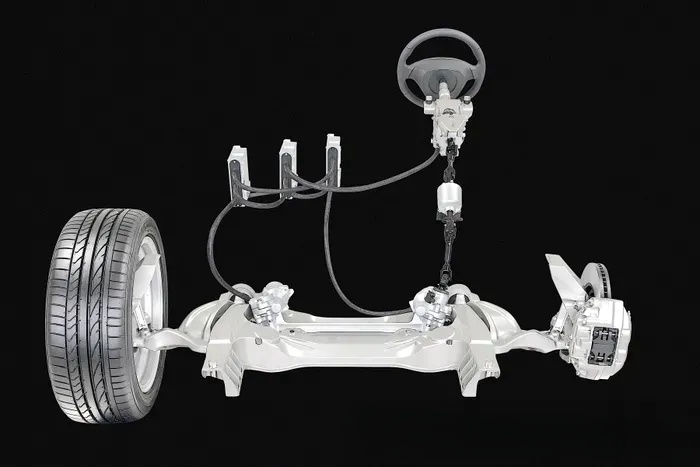
Руль-чыбык технологиясе хәзерге вакытта машиналарда, нигездә, арткы тәгәрмәчләрдә киң кулланыла, һәм алгы рульдә бик сирәк кулланыла. Төп сәбәп - бу технологиядә бернинди проблема да була алмый, һәм электр сигналының өзелүе күп аспектлар аркасында булырга мөмкин, мәсәлән, батарея көче сигналның тоткарлануы югалу һ.б.
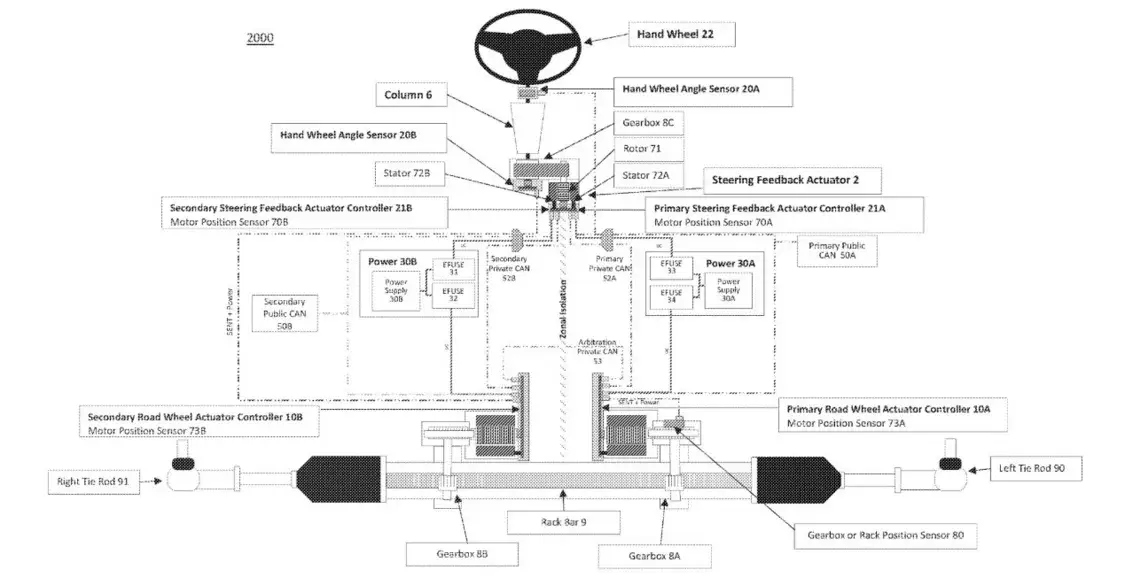
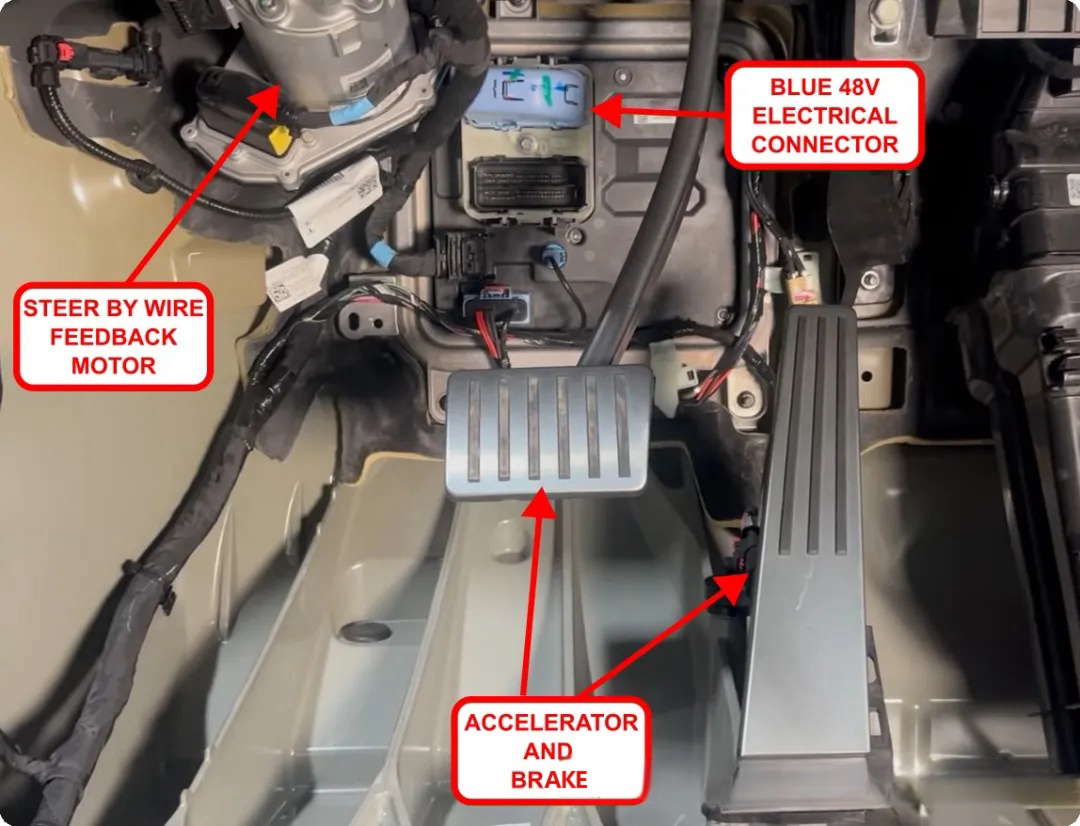
Батарейканың кинәт көче бетмәсен өчен, Cybertruck 48V батарея системасын кулланып, астагы рәсемнең сул ягында двигательне эшләтеп җибәрә, шулай ук югары көчәнеш көченә дә тоташа. Батарейканың эшләмәвен тәэмин итү өчен шулай ук 2 резерв батарея бар, һәм ул икеләтә артык дизайн.
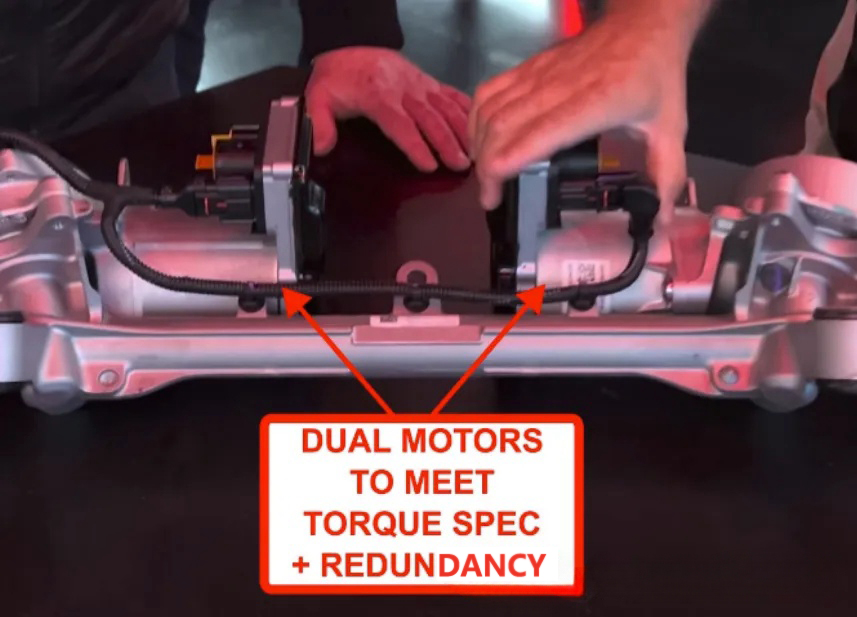
Кибертрукның руль-чыбык системасы ике двигатель куллана, һәрберсе аз тизлектәге машина кую шартларында максималь моментның якынча 50-60% җитештерә ала. Берсе уңышсызлыкка ирешсә, артык мотор бар. Арткы руль системасын йөртү өчен шул ук двигатель (бер генә) кулланыла. Бу двигатель йөртүчегә симуляцияле кире кайту хисен бирә ала. Feedback бу җавап бик мөһим. Бу кире кайтмыйча, машина йөртүче рульне сизә алмый. ситуация, һәм ул шулай ук шина һәм җир мәгълүматларын анализ бүлегенә яхшырак йөртү тәҗрибәсе белән тәэмин итә ала. Мәсәлән, юнәлешне борганда, ул шиналар белән җир арасындагы иң яхшы тотуны саклый ала.
Электр сигналлары традицион механик контрольне алыштырганга, сигнал тапшыруның эффективлыгы һәм вакытында булуы бик мөһим. Кибертрук традицион CAN элемтәсен алыштыру өчен Ethernet элемтәсен куллана. Мәгълүматны күчерү өчен Gigabit Ethernet системасы бар, ул югары тизлекле элемтә ихтыяҗларын канәгатьләндерә ала, мәгълүмат челтәренең озынлыгы ярты миллисекунд кына, борылыш сигналлары өчен идеаль итә, һәм шулай ук төрле контроллерларга рөхсәт итәр өчен җитәрлек киңлек бирә. реаль вакытта аралашырга.
Ethernet CAN элемтәсенә караганда югарырак киңлеккә ия. Бөтен машина ромашка чылбырын бүлешә ала. POE технологиясен кулланып, Ethernet интерфейсы турыдан-туры түбән көчәнешле электр тәэминатысыз эшләп була, бу чыбык җайланмаларының бәясен киметә ала. Бу технология шулай ук тиз коммерцияләштереләчәк һәм тиз коммерцияләштерү һәм Ethernet машинасында һәм киләчәктә акыллы йөртү белән тормышка ашырылачак.
Йомгаклау:
Руль-чыбык технологиясе бик алга китмәсә дә, ул машиналарда партияләрдә кулланылган. Ник дигәндә, алдагы Лексус крабларны тотарга тырышканда күп проблемалар белән очрашты.
Традицион сенсор механик контролен электр сигналлары аша юкка чыгару, югары сыйфатлы һәм түбән бәя булса да, машина йөртүчеләргә яхшырак йөртү тәҗрибәсенә ия булырга мөмкин, ләкин транспорт өчен иң төп таләп - куркынычсызлык. Электр сигналларында уңышсызлык факторларының күп дәрәҗәсе бар.
Технологик алгарышны алга җибәрү базар тикшерүен таләп итә һәм вакыт таләп итә. Киләчәктә бу технология бик популярлашса, тотрыклы булса, "электр тимераякта" интеграль технология тагын да камилләштереләчәк.
Пост вакыты: 01-2024 апрель