Рульове керування
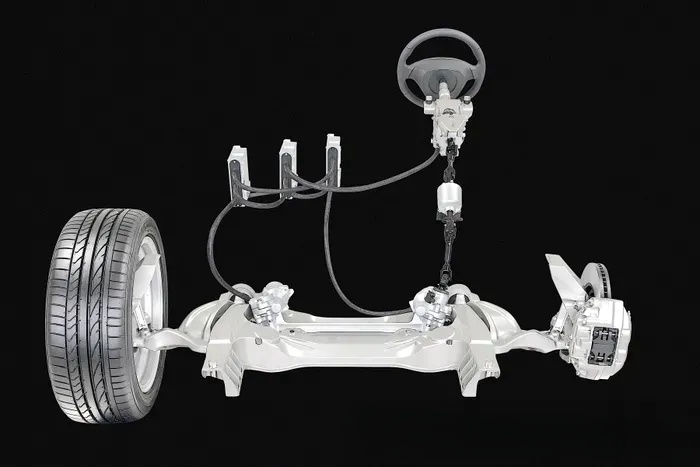
Cybertruck використовує дротяне керування обертанням, щоб замінити традиційний механічний метод обертання автомобіля, роблячи керування більш досконалим. Це також необхідний крок для переходу до висококласного інтелектуального водіння.
Що таке система рульового керування? Простіше кажучи, система бездротового керування повністю скасовує фізичний зв’язок між кермом і кермом і використовує електричні сигнали для керування кермом.
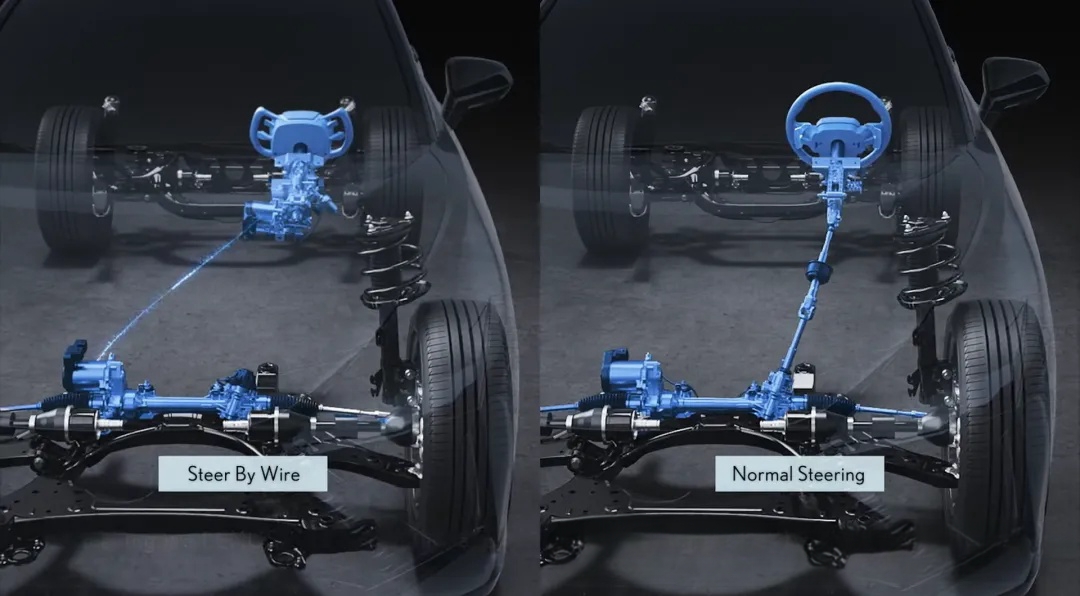
Система рульового управління не тільки має всі переваги традиційної механічної системи рульового управління, але також може досягти кутових характеристик передачі, яких важко досягти за допомогою оптимізації механічних систем.
Система рульового керування не є новою технологією. Різні OEM-виробники вже давно розробили цю технологію, включаючи Toyota, Volkswagen, Great Wall, BYD, NIO тощо, а також всесвітньо відомі Tier 1 Bosch, Continental і ZF розробляють і впроваджують рульове керування за проводом систем, але лише Cybertruck Tesla був запущений у масове виробництво в справжньому сенсі.
Таким чином, наступні показники Cybertruck є провідними на ринку. Водночас ця технологія також є основною технологією «розсувного шасі», тому її подальший статус партії має велике значення.
Незважаючи на те, що технологія рульового керування може усунути оригінальний більш громіздкий механізм трансмісії порівняно з традиційною технологією та може зробити транспортний засіб легшим (легкий означає низьку вартість і довговічність) і нижчою ціною, електрифікація передає керування через сигнали. Якщо щось піде не так, то наслідки будуть дуже серйозними. Тому, коли ця технологія була вперше використана на авіаційних літаках, вона прийняла подвійну резервну конструкцію для подвійного страхування.
Технологія рульового керування зараз широко використовується в транспортних засобах, головним чином із заднім приводом, і рідко використовується в передньопривідних. Основна причина полягає в тому, що ця технологія не може мати жодних проблем, а збої електричного сигналу можуть бути спричинені багатьма аспектами, наприклад, відключенням живлення акумулятора, втратою затримки сигналу тощо.
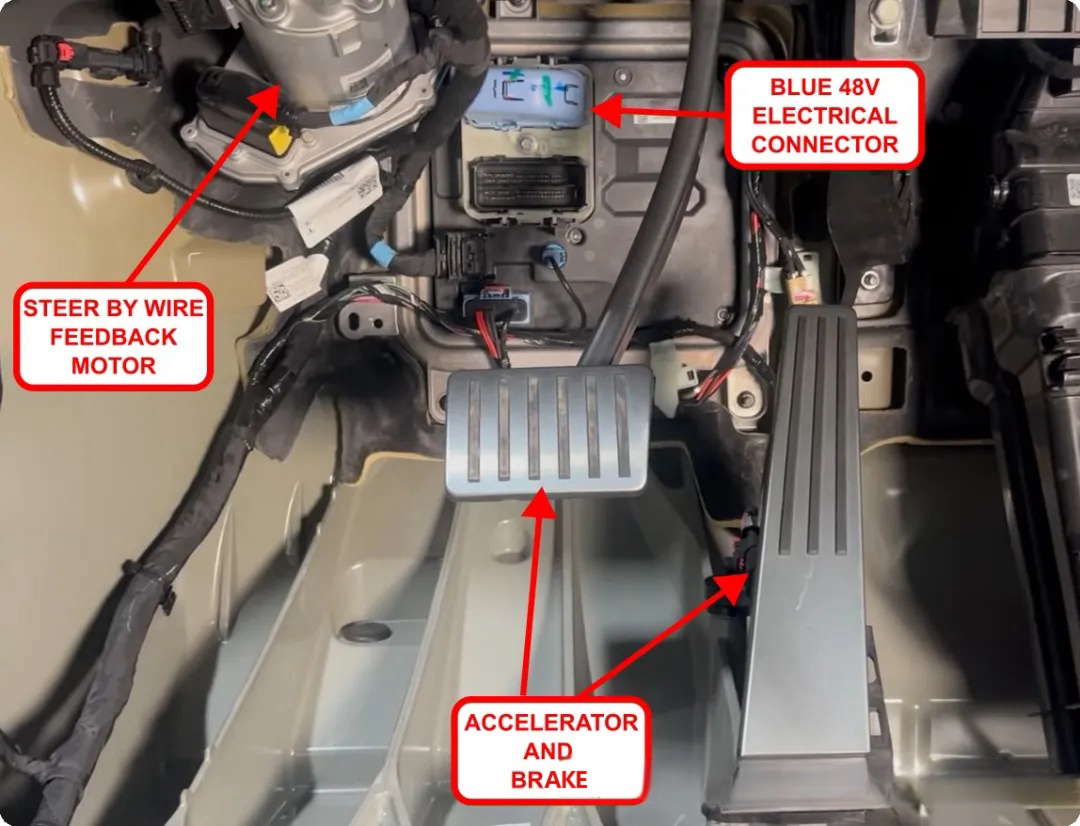
Щоб запобігти раптовому розрядженню акумулятора, Cybertruck не лише використовує акумуляторну систему 48 В для живлення двигуна на лівій стороні зображення нижче, але також підключається до джерела високої напруги. Є також 2 резервні батареї, щоб гарантувати, що батарея не вмикається, і це також подвійний резервний дизайн.
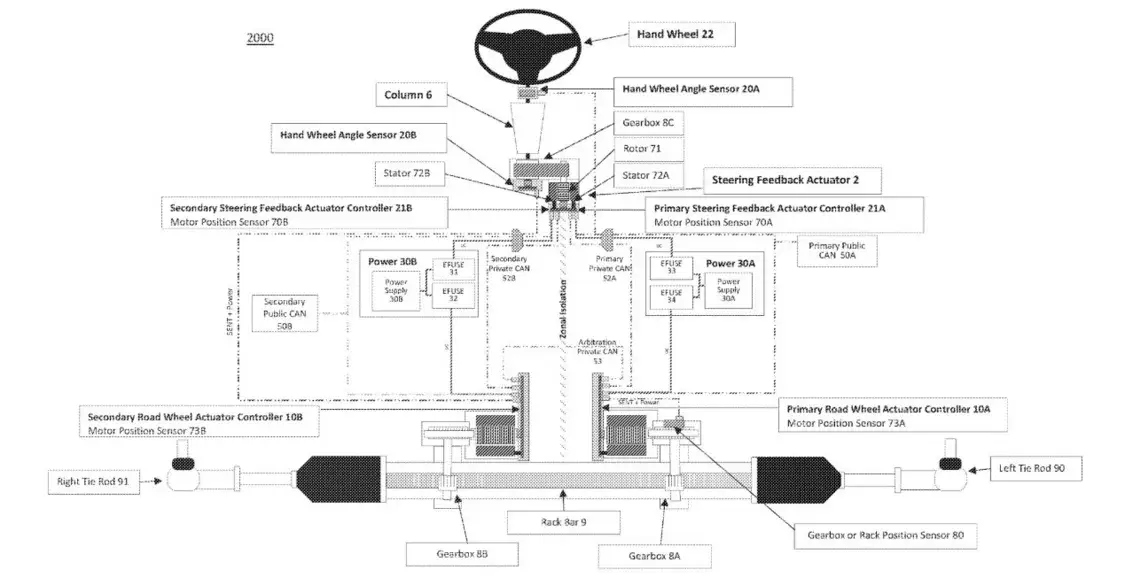
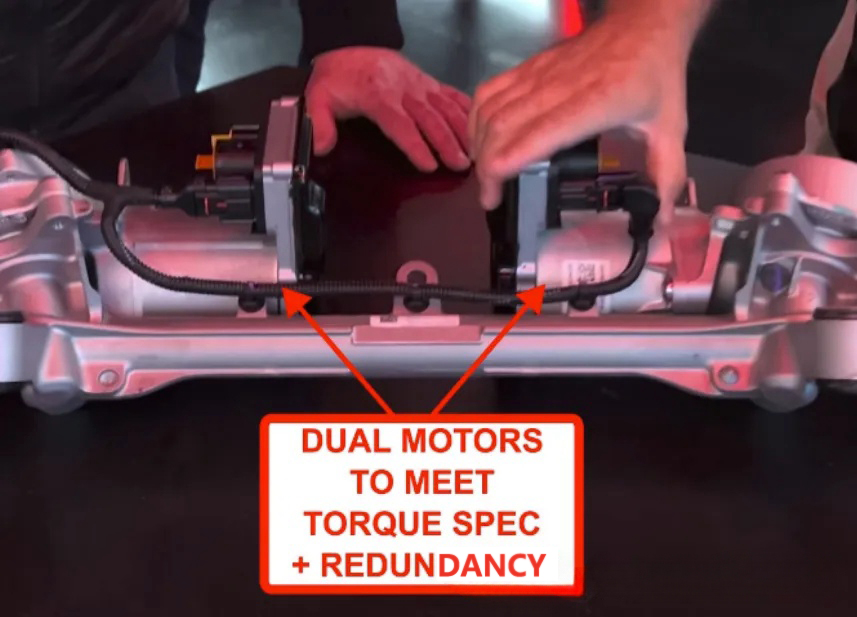
Система рульового керування Cybertruck використовує два двигуни, кожен із яких здатний створювати приблизно 50-60% максимального крутного моменту під час паркування на низькій швидкості. Якщо один з них виходить з ладу, залишається один доступний двигун для забезпечення резервування. Той самий двигун (лише один) використовується для приводу задньої системи рульового керування. Цей двигун може дати водієві відчуття симуляції зворотного зв’язку, цей зворотний зв’язок дуже важливий. Без цього зворотного зв’язку водій гірше сприймає керування кермом. ситуації, а також може передавати дані про шини та грунт до блоку аналізу, щоб забезпечити кращий досвід водіння. Наприклад, коли ви повертаєте напрямок, він може підтримувати найкраще зчеплення між шинами та землею.
Оскільки електричні сигнали замінили традиційне механічне управління, ефективність і своєчасність передачі сигналу дуже важливі. Cybertruc використовує зв'язок Ethernet замість традиційного зв'язку CAN. Він має систему Gigabit Ethernet для передачі даних, яка може задовольнити потреби високошвидкісного зв’язку, мережа даних має затримку лише півмілісекунди, що робить її ідеальною для покажчиків повороту, а також забезпечує достатню пропускну здатність для різних контролерів. спілкуватися в реальному часі.
Ethernet має вищу пропускну здатність, ніж зв’язок CAN. Весь транспортний засіб може спільно використовувати ланцюжок. Використовуючи технологію POE, інтерфейс Ethernet можна живити безпосередньо без окремого набору низьковольтних джерел живлення, що може значно знизити вартість джгута проводів. Ця технологія також буде швидко комерціалізована та впроваджена разом із швидкою комерціалізацією та впровадженням автомобільного Ethernet і майбутнього розумного водіння.
Підведіть підсумки:
Незважаючи на те, що технологія рульового керування не дуже просунута, вона використовується в автомобілях партіями. Принаймні попередній Lexus зіткнувся з багатьма проблемами, коли намагався ловити крабів.
Цей тип прямого усунення традиційного сенсорного механічного керування за допомогою електричних сигналів, хоча він має високу якість і низьку ціну, також може дозволити водіям отримати кращий досвід водіння, але найголовнішою вимогою до транспортних засобів є безпека. Існує багато рівнів факторів відмови в електричних сигналах.
Просування технологічного прогресу потребує перевірки ринку та потребує часу. Якщо ця технологія стане дуже популярною в майбутньому, якщо вона буде стабільною, інтегрована технологія «електричного скейтборду» буде вдосконалюватися.
Час публікації: 01 квітня 2024 р